

1. SPI����
1.1. SPI���߸���
SPI����Ӣ��Serial Peripheral interface����д������˼����Ǵ�����Χ�豸�ӿ�����Motorola��������MC68HCXXϵ�д������϶���ġ�SPI�ӿ���ҪӦ���� EEPROM��FLASH��ʵʱʱ�ӣ�ADת���������������źŴ������������źŽ�����֮�䡣SPI����һ�ָ��ٵģ�ȫ˫����ͬ����ͨ�����ߣ�������оƬ�Ĺܽ���ֻ�����ĸ��ߣ���Լ��оƬ�Ĺܽţ�ͬʱΪPCB�IJ����Ͻ�ʡ�ռ䣬�ṩ���㣬���dz������ּ����õ����ԣ�����Խ��Խ���оƬ����������ͨ��Э�顣SPI���ߵĹ��ɼ��ź�������ͼ1-1��ʾ��
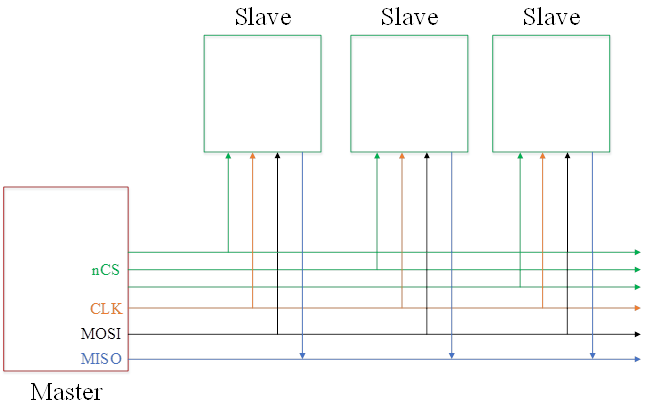
ͼ1-1 SPI����ģ��
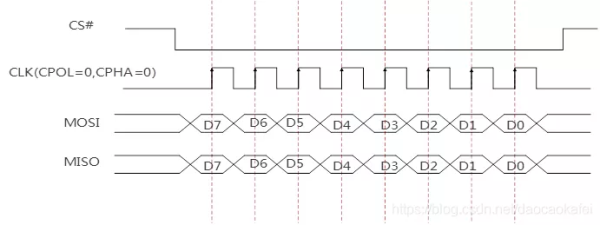
1.2. SPI����ʱ��
SPI�ӿ���Master�����²����Ĵ��豸ʹ���źź�ʱ���źţ�����˫����λ�Ĵ�����λ����������ݽ������������ݸ�λ��ǰ(MSB first)����λ�ں�����ͼ��ʾ����CLK���½��������ݸı䣬������һλ���ݱ�������λ�Ĵ�����
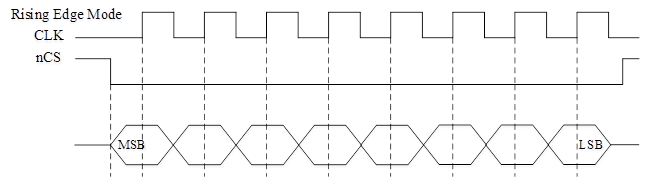
ͼ1-2 spi����ʱ��ͼ
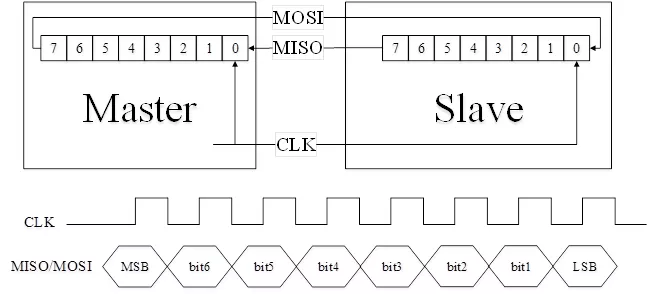
��һ��SPIʱ�������ڣ���������²�����(1)Masterͨ��MOSI�߷���1λ���ݣ�ͬʱSlaveͨ��MOSI�߶�ȡ��1λ����;(2)Slaveͨ��MISO�߷���1λ���ݣ�ͬʱMasterͨ��MISO�߶�ȡ��1λ���ݡ�Master��Slave����һ����λ�Ĵ�������ͼ1-3��ʾ��������������λ�Ĵ������ӳɻ�״������CLK�ı仯��������MSB first�ķ�ʽ�����Ƴ�Master�Ĵ�����Slave�Ĵ�����������������Slave�Ĵ�����Master�Ĵ��������Ĵ����е�����ȫ���Ƴ�ʱ���൱������������Ĵ������ݵĽ�����
1.3. SPI���ߴ���ģʽ
SPI���ߴ���һ����4��ģʽ����4��ģʽ�ֱ���ʱ�Ӽ���(CPOL��Clock Polarity)��ʱ����λ(CPHA��Clock Phase)�����壬����CPOL�����涨��SCKʱ���źſ���״̬�ĵ�ƽ��CPHA�涨����������SCKʱ�ӵ������ر����������½��ر�������������ģʽ��ʱ��ͼ����ͼ1-4��ʾ��
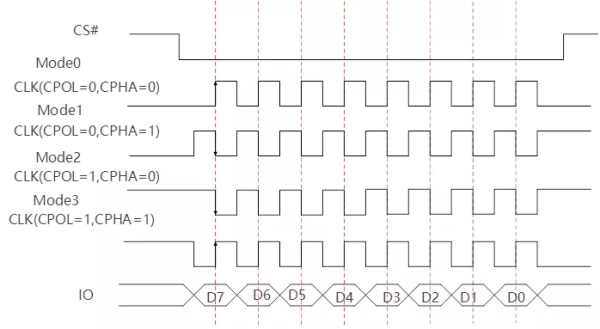
ͼ1-5 mode0�µ�SPIʱ��ͼ
1.4. SPI���ߵ���ȱ��
(1) �ڵ�Ե��ͨ���У�SPI�ӿڲ���Ҫ����Ѱַ��������Ϊȫ˫��ͨ�ţ��Եü�Ч��(2) SPI�ӿ�û��ָ���������ƣ�û��Ӧ������ȷ���Ƿ���յ����ݡ�
2. Linux SPI ���
2.1. �����ܹ�
Linuxϵͳ��spi�豸���кܺõ�֧�֣�linuxϵͳ�µ�spi������������Ͽ��Է�Ϊ3�����֣�
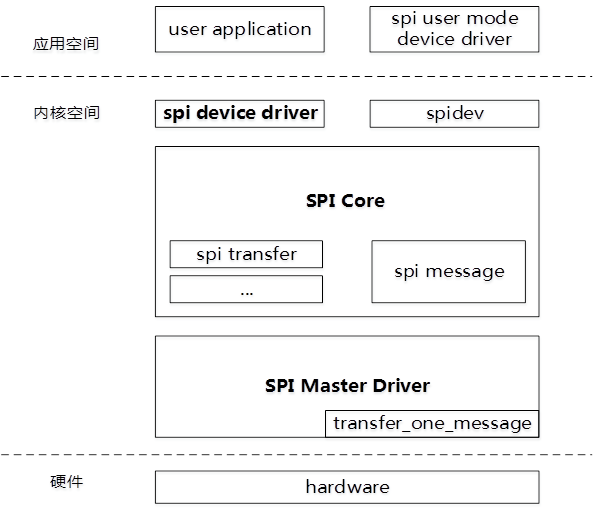
ͼ2-1 spi�����ܹ�ͼ
2.2. ��ʼ�����˳�����
2.2.1. ע��spi������
ע��spi���������ں˷�Ϊ�����Σ���һ���Σ�ʹ��spi_alloc_master,����һ��spi_master�Ŀռ䣬����������ͼ2-2��ʾ��

�ڶ��Σ�ʹ��spi_register_master����һ�η����spi_masterע�ᵽ�ں��У�����������2-3��ʾ��
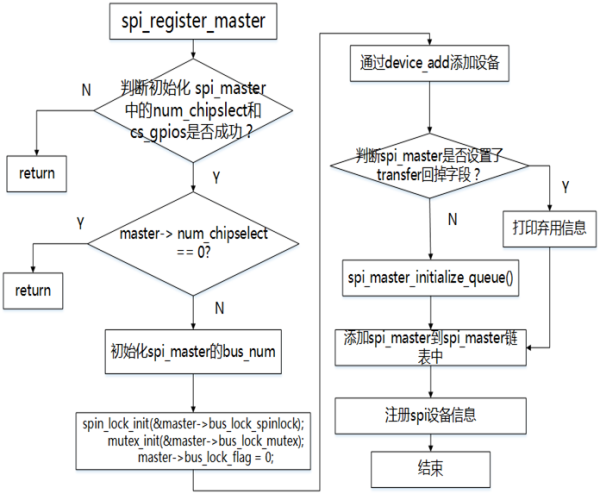
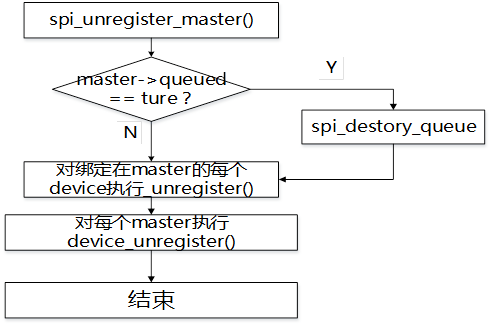
2.2.2. ע��spi������
spi������ע����������ͼ2-4��ʾ��
2.3. �ؼ����ݽṹ
2.3.1. spi_device
- struct spi_device {
- struct device dev; /*spi��������Ӧ��device�ṹ
- struct spi_master *master; /*�豸ʹ�õ�master�ṹ�������ĸ�����������*/
- u32 max_speed_hz; /*ͨѶʱ�����Ƶ��*/
- u8 chip_select; /*Ƭѡ�ţ�ÿ��master֧�ֶ��spi_device */
- u8 mode;
- #define SPI_CPHA 0x01 /* clock phase */
- #define SPI_CPOL 0x02 /* clock polarity */
- #define SPI_MODE_0 (0|0) /* (original MicroWire) */
- #define SPI_MODE_1 (0|SPI_CPHA)
- #define SPI_MODE_2 (SPI_CPOL|0)
- #define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
- #define SPI_CS_HIGH 0x04 /* chipselect active high? */
- #define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
- #define SPI_3WIRE 0x10 /* SI/SO signals shared */
- #define SPI_LOOP 0x20 /* loopback mode */
- #define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
- #define SPI_READY 0x80 /* slave pulls low to pause */
- u8 bits_per_word; /*ÿ���ֳ��ı�������Ĭ����8*/
- int irq;
- void *controller_state; /*������״̬*/
- void *controller_data; /*����������*/
- char modalias[SPI_NAME_SIZE]; /* �豸���������� */
- int cs_gpio; /* chip select gpio */
- /*
- * likely need more hooks for more protocol options affecting how
- * the controller talks to each chip, like:
- * - memory packing (12 bit samples into low bits, others zeroed)
- * - priority
- * - drop chipselect after each word
- * - chipselect delays
- * - ...
- */
- };
spi_device����һ����Χspi�豸����master controller driverע����ɺ�ɨ��BSP��ע���豸�������豸��������spi_busע����������ں��У�ÿ��spi_device����һ��������spi�豸��
2.3.2. spi_driver
- struct spi_driver {
- const struct spi_device_id *id_table; /*֧�ֵ�spi_device�豸��*/
- int (*probe)(struct spi_device *spi);
- int (*remove)(struct spi_device *spi);
- void (*shutdown)(struct spi_device *spi);
- int (*suspend)(struct spi_device *spi, pm_message_t mesg);
- int (*resume)(struct spi_device *spi);
- struct device_driver driver;
- };
spi_driver����һ��SPI protocol drivers������������
2.3.3. struct spi_master
- struct spi_master {
- struct device dev; /*spi��������Ӧ��device�ṹ*/
- struct list_head list; /*����
- /* other than negative (== assign one dynamically), bus_num is fully
- * board-specific. usually that simplifies to being SOC-specific.
- * example: one SOC has three SPI controllers, numbered 0..2,
- * and one board's schematics might show it using SPI-2. software
- * would normally use bus_num=2 for that controller.
- */
- s16 bus_num; /*���ߣ����������ţ�*/
- /* chipselects will be integral to many controllers; some others
- * might use board-specific GPIOs.
- */
- u16 num_chipselect; /*Ƭѡ����*/
- /* some SPI controllers pose alignment requirements on DMAable
- * buffers; let protocol drivers know about these requirements.
- */
- u16 dma_alignment;
- /* spi_device.mode flags understood by this controller driver */
- u16 mode_bits; /* master֧�ֵ��豸ģʽ */
- /* bitmask of supported bits_per_word for transfers */
- u32 bits_per_word_mask;
- /* other constraints relevant to this driver */
- u16 flags; /*������ijЩ���������ı�־λ
- #define SPI_MASTER_HALF_DUPLEX BIT(0) /* can't do full duplex */
- #define SPI_MASTER_NO_RX BIT(1) /* can't do buffer read */
- #define SPI_MASTER_NO_TX BIT(2) /* can't do buffer write */
- /* lock and mutex for SPI bus locking */
- spinlock_t bus_lock_spinlock;
- struct mutex bus_lock_mutex;
- /* flag indicating that the SPI bus is locked for exclusive use */
- bool bus_lock_flag;
- /* Setup mode and clock, etc (spi driver may call many times).
- *
- * IMPORTANT: this may be called when transfers to another
- * device are active. DO NOT UPDATE SHARED REGISTERS in ways
- * which could break those transfers.
- */
- int (*setup)(struct spi_device *spi); /*����spi�豸����Ӳ�����á�����spi����ģʽ��ʱ�ӵ�*/
- /* bidirectional bulk transfers
- *
- * + The transfer() method may not sleep; its main role is
- * just to add the message to the queue.
- * + For now there's no remove-from-queue operation, or
- * any other request management
- * + To a given spi_device, message queueing is pure fifo
- *
- * + The master's main job is to process its message queue,
- * selecting a chip then transferring data
- * + If there are multiple spi_device children, the i/o queue
- * arbitration algorithm is unspecified (round robin, fifo,
- * priority, reservations, preemption, etc)
- *
- * + Chipselect stays active during the entire message
- * (unless modified by spi_transfer.cs_change != 0).
- * + The message transfers use clock and SPI mode parameters
- * previously established by setup() for this device
- */
- int (*transfer)(struct spi_device *spi,
- struct spi_message *mesg); /*������Ϣ�����еķ������˺�������˯�ߡ�����ְ���ǰ��ŷ����Ĵ��Ͳ��ҵ���ע��Ļص�����complete()*/
- /* called on release() to free memory provided by spi_master */
- void (*cleanup)(struct spi_device *spi);/*cleanup��������spidev_release�����б����ã�spidev_release���Ǽ�Ϊspi dev��release������*/
- /*
- * These hooks are for drivers that want to use the generic
- * master transfer queueing mechanism. If these are used, the
- * transfer() function above must NOT be specified by the driver.
- * Over time we expect SPI drivers to be phased over to this API.
- */
- bool queued;
- struct kthread_worker kworker; /*���ڹ������ݴ�����Ϣ���еĹ��������߳�*/
- struct task_struct *kworker_task;
- struct kthread_work pump_messages; /*����ʵ�����ݴ�����еĹ�������*/
- spinlock_t queue_lock;
- struct list_head queue; /*�ÿ���������Ϣ���У����еȴ�����Ķ��й��ڸ�������*/
- struct spi_message *cur_msg;/*��ǰ���ڴ�������Ϣ����*/
- bool busy; /æ״̬*/
- bool running; /*������*/
- bool rt;
- int (*prepare_transfer_hardware)(struct spi_master *master); /*�ص���������ʽ������ǰ�ᱻ���ã�������Ӳ����Դ*/
- int (*transfer_one_message)(struct spi_master *master, struct spi_message *mesg); /*������Ϣ��ԭ�Ӵ���ص�������������ÿ����Ϣ����ص�һ�θûص�����ɴ��乤��*/
- int (*unprepare_transfer_hardware)(struct spi_master *master); /*�����ص�����*/
- /* gpio chip select */
- int *cs_gpios;
- };
spi_master����һ��spi��������
2.3.4. struct spi_message ��spi_transfer
Ҫ��ɺ�SPI�豸�����ݴ��乤�������ǻ���Ҫ�����������ݽṹ��spi_message��spi_transfer��
spi_message������һ����spi_transfer�ṹ���У�һ��������������һ��spi_message�����е�spi_transferӦ�ð�˳���ͣ����Ҳ��ܱ�����spi_message��ϣ�����������Ϊspi_message����һ��SPI���ݽ�����ԭ�Ӳ������������ǿ������������ݽṹ�Ķ��壺
struct spi_message ��
- struct spi_message {
- struct list_head transfers; /*spi_transfer�������У��˴���Ϣ�Ĵ���ζ��У�һ����Ϣ�������������Ρ�*/
- struct spi_device *spi; /*�����Ŀ���豸*/
- unsigned is_dma_mapped:1; /*���Ϊ�棬�˴ε����ṩdma��cpu�����ַ��*/
- /* REVISIT: we might want a flag affecting the behavior of the
- * last transfer ... allowing things like "read 16 bit length L"
- * immediately followed by "read L bytes". Basically imposing
- * a specific message scheduling algorithm.
- *
- * Some controller drivers (message-at-a-time queue processing)
- * could provide that as their default scheduling algorithm. But
- * others (with multi-message pipelines) could need a flag to
- * tell them about such special cases.
- */
- /* completion is reported through a callback */
- void (*complete)(void *context);/*�첽������ɺ�Ļص�����*/
- void *context; /*�ص������IJ���*/
- unsigned actual_length; /*ʵ�ʴ���ij���*/
- int status; /*����Ϣ�ķ��ͽ�����ɹ�����0��������һ�����Ĵ����롣*/
- /* for optional use by whatever driver currently owns the
- * spi_message ... between calls to spi_async and then later
- * complete(), that's the spi_master controller driver.
- */
- struct list_head queue;
- void *state;
- };
�����ֶ�queue���ڰѸýṹ���ڴ�����������spi_master�ṹ��queue�ֶ��ϣ��������Ͽ���ͬʱ��������spi_message�����Ŷӡ���һ�������ֶ�transfers���������ӹ��ڱ�message�µ�spi_tranfer�ṹ��complete�ص���������ڸ�message�µ�����spi_transfer�����������ʱ�����ã��Ա�֪ͨЭ�������������յ��������Լ�����һ����Ҫ���͵����ݡ�������������spi_transfer�ṹ��spi_transfer
- struct spi_transfer {
- /* it's ok if tx_buf == rx_buf (right?)
- * for MicroWire, one buffer must be null
- * buffers must work with dma_*map_single() calls, unless
- * spi_message.is_dma_mapped reports a pre-existing mapping
- */
- const void *tx_buf; /*���ͻ�����*/
- void *rx_buf; /*���ջ�����*/
- unsigned len; /*���������ȣ�tx��rx�Ĵ�С���ֽ�������ָ���Ǹ��ԵĴ�С*/
- dma_addr_t tx_dma; /*tx��dma��ַ*/
- dma_addr_t rx_dma; /*rx��dma��ַ*/
- unsigned cs_change:1; /*��ǰspi_transfer�������֮������Ƭѡ*/
- u8 bits_per_word; /*ÿ���ֳ��ı�������0����ʹ��spi_device�е�Ĭ��ֵ8*/
- u16 delay_usecs; /*�������һ��spi_transfer�����ʱʱ�䣬�˴δ��������Ƭѡ�ı�֮�����ʱ��֮��ͻ�������һ��������߽���������Ϣ*/
- u32 speed_hz; /*ͨ��ʱ�ӡ������0��ʹ��Ĭ��ֵ*/
- #ifdef CONFIG_SPI_LOMBO
- struct lombo_spi_operate_para *esop;
- #endif
- struct list_head transfer_list; /*�������ӵ�spi_message���������ӵ�˫�����ӽڵ�*/
- };
���ȣ�transfer_list�����ֶ����ڰѸ�transfer����һ��spi_message�ṹ�У�tx_buf��rx_buf�ṩ�˷�dmaģʽ�µ����ݻ�������ַ��len������Ҫ�������ݵij��ȣ�tx_dma��rx_dma�������dmaģʽ�µĻ�������ַ��ԭ��������spi_transfer���Ǵ������С��λ��֮������������spi_message���д�����Ҿ���ԭ���ǣ���ʱ��ϣ����spi�豸�Ķ���������ĵ�ַ(��Ĵ���)һ����д�룬���û��spi_message���а������Ķ��spi_transfer�������Ϊͨ�����������ݴ�����������һ���ں��߳�(��������)����ɵģ�������ĺ�����ǻ���ɸ���Ľ����л���Ч�ʽ��ͣ��ӳ����ӣ�������ڶ����������ַ��С��ģ���ݴ��Ͷ��Ծ�Ϊ���ԡ�
2.3.5. spi_board_info
- struct spi_board_info {
- /* the device name and module name are coupled, like platform_bus;
- * "modalias" is normally the driver name.
- *
- * platform_data goes to spi_device.dev.platform_data,
- * controller_data goes to spi_device.controller_data,
- * irq is copied too
- */
- char modalias[SPI_NAME_SIZE]; /*����*/
- const void *platform_data; /*ƽ̨����*/
- void *controller_data; /*����������*/
- int irq;
- /* slower signaling on noisy or low voltage boards */
- u32 max_speed_hz; /*�������*/
- /* bus_num is board specific and matches the bus_num of some
- * spi_master that will probably be registered later.
- *
- * chip_select reflects how this chip is wired to that master;
- * it's less than num_chipselect.
- */
- u16 bus_num; /*spi���߱��*/
- u16 chip_select; /*Ƭѡ*/
- /* mode becomes spi_device.mode, and is essential for chips
- * where the default of SPI_CS_HIGH = 0 is wrong.
- */
- u8 mode; /*ģʽ */
- /* ... may need additional spi_device chip config data here.
- * avoid stuff protocol drivers can set; but include stuff
- * needed to behave without being bound to a driver:
- * - quirks like clock rate mattering when not selected
- */
- };
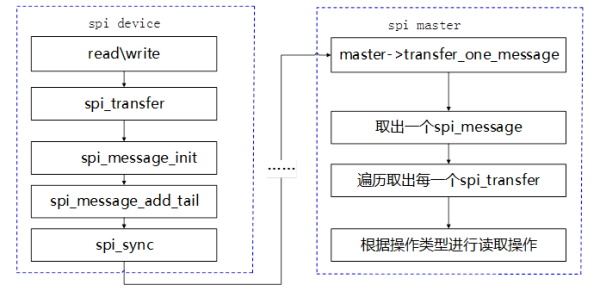
2.4. ���ݴ�������
��������ݴ������̴�������������:
����ʾ��ͼ��ͼ2-5��ʾ��
2.4.1. ������
2.4.1.1. spi_message_init
- static inline void spi_message_init(struct spi_message *m)
- {
- memset(m, 0, sizeof *m);
- INIT_LIST_HEAD(&m->transfers);
- }
��ʼ��spi_message�����message����ʼ��transfers����ͷ��
2.4.1.2. spi_message_add_tail
- static inline void
- spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)
- {
- list_add_tail(&t->transfer_list, &m->transfers);
- }
��spi_transfer���뵽spi_message������β����
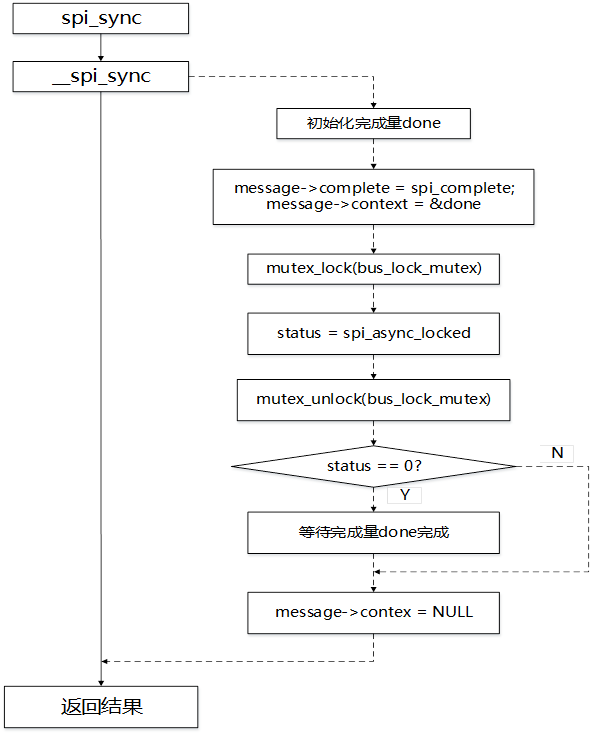
2.4.2. ���ݴ���
SPI���ݴ�����������ַ�ʽ��ͬ����ʽ���첽��ʽ����νͬ����ʽ��ָ���ݴ���ķ����߱���ȴ����δ���Ľ������ڼ䲻�����������飬�ô��������;��ǣ����ô���ĺ�����ֱ�����ݴ�����ɣ������Ż᷵�ء����첽��ʽ�������෴�����ݴ���ķ���������ȴ�����Ľ��������ݴ����ڼ仹�������������飬�ô��������;��ǣ����ô���ĺ������������̷��ض����õȴ����ݴ�����ɣ�����ֻ������һ���ص�������������ɺûص������ᱻ������֪ͨ���������ݴ����Ѿ���ɡ�ͬ����ʽ�����ã����ʺϴ�����Щ�������ݵĵ��δ��䡣���Ƕ���������������Ĵ�����˵���첽��ʽ���Եø��Ӻ��ʡ�����SPI��������˵��Ҫ֧���첽��ʽ����Ҫ������������״����
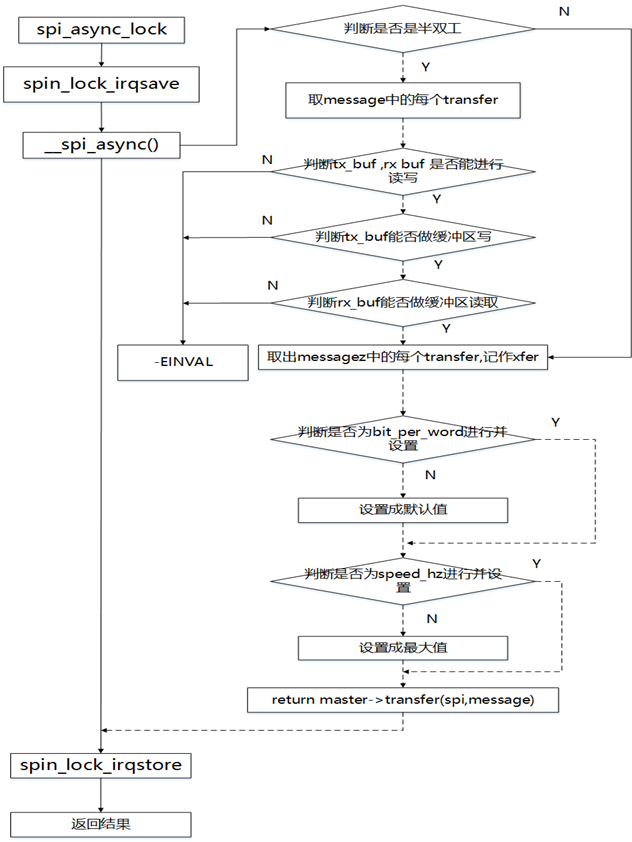
��η���spi_async_locked�ӿڵ�ʵ�����̣���ͼ2-7��ʾ��
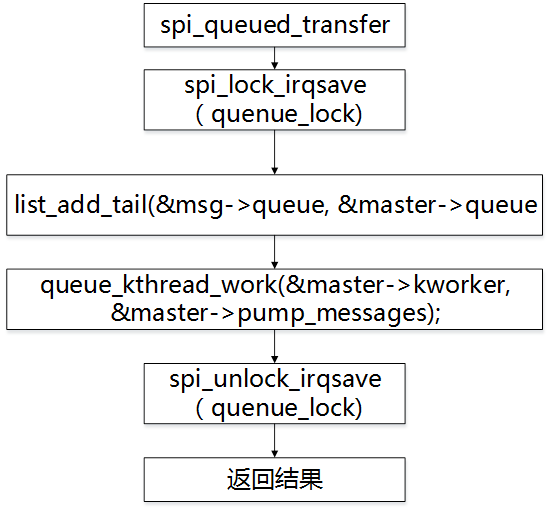
spi_queued_transfer�ӿڵ�ʵ��������ͼ3-8��ʾ��
spi_pump_messages�����Ĵ���������ͼ3-9��ʾ��
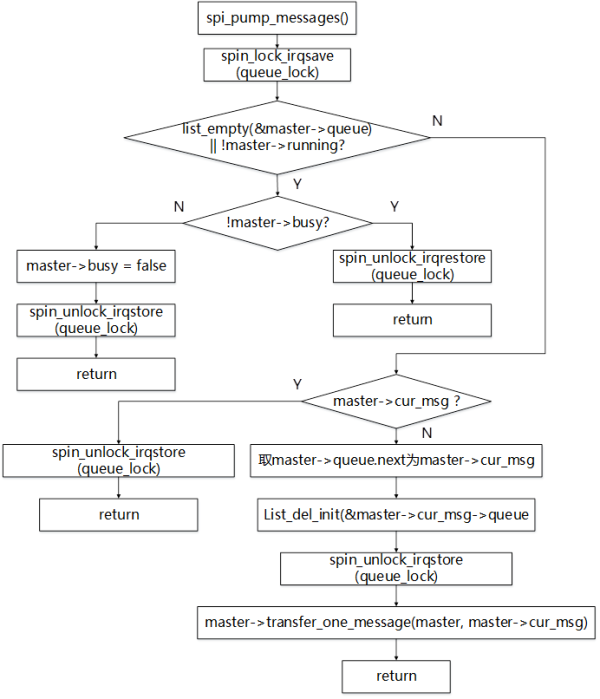
ͼ��transfer_one_message��spi����������Ҫʵ�ֵģ���Ҫ�����Ǵ���spi_message�е�ÿ��spi_transfer��
2.5. �ؼ���������
2.5.1. spi_alloc_master
ԭ�ͣ�
- struct spi_master *spi_alloc_master(struct device *dev, unsigned size)
���ܣ�����һ��spi_master�ṹ��ָ�롣
������dev:spi������deviceָ�� size �������driver-private data��С
����ֵ ���ɹ�������spi_masterָ��;����NULL
2.5.2. spi_register_master
ԭ�ͣ�
- int spi_register_master(struct spi_master *master)
���� ע��spi�������������ںˡ�
���� master��spi_masterָ��
����ֵ �ɹ�������0;���ش�����
2.5.3. spi_unregister_master
ԭ�ͣ�
- void spi_unregister_master(struct spi_master *master)
���� ע��spi������������
���� master��spi_masterָ��
����ֵ ��
3. Demo
(�ο�������ԭ��)
- #include <linux/types.h>
- #include <linux/kernel.h>
- #include <linux/delay.h>
- #include <linux/ide.h>
- #include <linux/init.h>
- #include <linux/module.h>
- #include <linux/errno.h>
- #include <linux/gpio.h>
- #include <linux/cdev.h>
- #include <linux/device.h>
- #include <linux/of_gpio.h>
- #include <linux/semaphore.h>
- #include <linux/timer.h>
- #include <linux/i2c.h>
- #include <linux/spi/spi.h>
- #include <linux/of.h>
- #include <linux/of_address.h>
- #include <linux/of_gpio.h>
- #include <linux/platform_device.h>
- #include <asm/mach/map.h>
- #include <asm/uaccess.h>
- #include <asm/io.h>
- #include "icm20608reg.h"
- /***************************************************************
- Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
- �ļ��� : icm20608.c
- ���� : ��
- �汾 : V1.0
- ���� : ICM20608 SPI��������
- ���� : ��
- ��̳ :
- ��־ : ����V1.0 2019/9/2 ����
- ***************************************************************/
- #define ICM20608_CNT 1
- #define ICM20608_NAME "icm20608"
- struct icm20608_dev {
- dev_t devid; /* �豸�� */
- struct cdev cdev; /* cdev */
- struct class *class; /* �� */
- struct device *device; /* �豸 */
- struct device_node *nd; /* �豸�ڵ� */
- int major; /* ���豸�� */
- void *private_data; /* ˽������ */
- int cs_gpio; /* Ƭѡ��ʹ�õ�GPIO��� */
- signed int gyro_x_adc; /* ������X��ԭʼֵ */
- signed int gyro_y_adc; /* ������Y��ԭʼֵ */
- signed int gyro_z_adc; /* ������Z��ԭʼֵ */
- signed int accel_x_adc; /* ���ٶȼ�X��ԭʼֵ */
- signed int accel_y_adc; /* ���ٶȼ�Y��ԭʼֵ */
- signed int accel_z_adc; /* ���ٶȼ�Z��ԭʼֵ */
- signed int temp_adc; /* �¶�ԭʼֵ */
- };
- static struct icm20608_dev icm20608dev;
- /*
- * @description : ��icm20608��ȡ����Ĵ�������
- * @param - dev: icm20608�豸
- * @param - reg: Ҫ��ȡ�ļĴ�����ַ
- * @param - val: ��ȡ��������
- * @param - len: Ҫ��ȡ�����ݳ���
- * @return : �������
- */
- static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg, void *buf, int len)
- {
- int ret;
- unsigned char txdata[len];
- struct spi_message m;
- struct spi_transfer *t;
- struct spi_device *spi = (struct spi_device *)dev->private_data;
- gpio_set_value(dev->cs_gpio, 0); /* Ƭѡ���ͣ�ѡ��ICM20608 */
- t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* �����ڴ� */
- /* ��1�Σ�����Ҫ��ȡ�ļĴ��ַ */
- txdata[0] = reg | 0x80; /* д���ݵ�ʱ��Ĵ�����ַbit8Ҫ��1 */
- t->tx_buf = txdata; /* Ҫ���͵����� */
- t->len = 1; /* 1���ֽ� */
- spi_message_init(&m); /* ��ʼ��spi_message */
- spi_message_add_tail(t, &m);/* ��spi_transfer���ӵ�spi_message���� */
- ret = spi_sync(spi, &m); /* ͬ������ */
- /* ��2�Σ���ȡ���� */
- txdata[0] = 0xff; /* ���һ��ֵ���˴������� */
- t->rx_buf = buf; /* ��ȡ�������� */
- t->len = len; /* Ҫ��ȡ�����ݳ��� */
- spi_message_init(&m); /* ��ʼ��spi_message */
- spi_message_add_tail(t, &m);/* ��spi_transfer���ӵ�spi_message���� */
- ret = spi_sync(spi, &m); /* ͬ������ */
- kfree(t); /* �ͷ��ڴ� */
- gpio_set_value(dev->cs_gpio, 1); /* Ƭѡ���ߣ��ͷ�ICM20608 */
- return ret;
- }
- /*
- * @description : ��icm20608����Ĵ���д������
- * @param - dev: icm20608�豸
- * @param - reg: Ҫд��ļĴ�����ַ
- * @param - val: Ҫд������ݻ�����
- * @param - len: Ҫд������ݳ���
- * @return : �������
- */
- static s32 icm20608_write_regs(struct icm20608_dev *dev, u8 reg, u8 *buf, u8 len)
- {
- int ret;
- unsigned char txdata[len];
- struct spi_message m;
- struct spi_transfer *t;
- struct spi_device *spi = (struct spi_device *)dev->private_data;
- t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL); /* �����ڴ� */
- gpio_set_value(dev->cs_gpio, 0); /* Ƭѡ���� */
- /* ��1�Σ�����Ҫ��ȡ�ļĴ��ַ */
- txdata[0] = reg & ~0x80; /* д���ݵ�ʱ��Ĵ�����ַbit8Ҫ���� */
- t->tx_buf = txdata; /* Ҫ���͵����� */
- t->len = 1; /* 1���ֽ� */
- spi_message_init(&m); /* ��ʼ��spi_message */
- spi_message_add_tail(t, &m);/* ��spi_transfer���ӵ�spi_message���� */
- ret = spi_sync(spi, &m); /* ͬ������ */
- /* ��2�Σ�����Ҫд������� */
- t->tx_buf = buf; /* Ҫд������� */
- t->len = len; /* д����ֽ��� */
- spi_message_init(&m); /* ��ʼ��spi_message */
- spi_message_add_tail(t, &m);/* ��spi_transfer���ӵ�spi_message���� */
- ret = spi_sync(spi, &m); /* ͬ������ */
- kfree(t); /* �ͷ��ڴ� */
- gpio_set_value(dev->cs_gpio, 1);/* Ƭѡ���ߣ��ͷ�ICM20608 */
- return ret;
- }
- /*
- * @description : ��ȡicm20608ָ���Ĵ���ֵ����ȡһ���Ĵ���
- * @param - dev: icm20608�豸
- * @param - reg: Ҫ��ȡ�ļĴ���
- * @return : ��ȡ���ļĴ���ֵ
- */
- static unsigned char icm20608_read_onereg(struct icm20608_dev *dev, u8 reg)
- {
- u8 data = 0;
- icm20608_read_regs(dev, reg, &data, 1);
- return data;
- }
- /*
- * @description : ��icm20608ָ���Ĵ���д��ָ����ֵ��дһ���Ĵ���
- * @param - dev: icm20608�豸
- * @param - reg: Ҫд�ļĴ���
- * @param - data: Ҫд���ֵ
- * @return : ��
- */
- static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg, u8 value)
- {
- u8 buf = value;
- icm20608_write_regs(dev, reg, &buf, 1);
- }
- /*
- * @description : ��ȡICM20608�����ݣ���ȡԭʼ���ݣ��������������ǡ�
- * : ������ٶȼƺ��ڲ��¶ȡ�
- * @param - dev : ICM20608�豸
- * @return : �ޡ�
- */
- void icm20608_readdata(struct icm20608_dev *dev)
- {
- unsigned char data[14];
- icm20608_read_regs(dev, ICM20_ACCEL_XOUT_H, data, 14);
- dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]);
- dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]);
- dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]);
- dev->temp_adc = (signed short)((data[6] << 8) | data[7]);
- dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]);
- dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);
- dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
- }
- /*
- * @description : ���豸
- * @param - inode : ���ݸ�������inode
- * @param - filp : �豸�ļ���file�ṹ���и�����privateate_data�ij�Ա����
- * һ����open��ʱ��private_data�������豸�ṹ�塣
- * @return : 0 �ɹ�;���� ʧ��
- */
- static int icm20608_open(struct inode *inode, struct file *filp)
- {
- filp->private_data = &icm20608dev; /* ����˽������ */
- return 0;
- }
- /*
- * @description : ���豸��ȡ����
- * @param - filp : Ҫ���豸�ļ�(�ļ�������)
- * @param - buf : ���ظ��û��ռ�����ݻ�����
- * @param - cnt : Ҫ��ȡ�����ݳ���
- * @param - offt : ������ļ���ַ��ƫ��
- * @return : ��ȡ���ֽ��������Ϊ��ֵ����ʾ��ȡʧ��
- */
- static ssize_t icm20608_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
- {
- signed int data[7];
- long err = 0;
- struct icm20608_dev *dev = (struct icm20608_dev *)filp->private_data;
- icm20608_readdata(dev);
- data[0] = dev->gyro_x_adc;
- data[1] = dev->gyro_y_adc;
- data[2] = dev->gyro_z_adc;
- data[3] = dev->accel_x_adc;
- data[4] = dev->accel_y_adc;
- data[5] = dev->accel_z_adc;
- data[6] = dev->temp_adc;
- err = copy_to_user(buf, data, sizeof(data));
- return 0;
- }
- /*
- * @description : �ر�/�ͷ��豸
- * @param - filp : Ҫ�رյ��豸�ļ�(�ļ�������)
- * @return : 0 �ɹ�;���� ʧ��
- */
- static int icm20608_release(struct inode *inode, struct file *filp)
- {
- return 0;
- }
- /* icm20608�������� */
- static const struct file_operations icm20608_ops = {
- .owner = THIS_MODULE,
- .open = icm20608_open,
- .read = icm20608_read,
- .release = icm20608_release,
- };
- /*
- * ICM20608�ڲ��Ĵ�����ʼ������
- * @param : ��
- * @return : ��
- */
- void icm20608_reginit(void)
- {
- u8 value = 0;
- icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x80);
- mdelay(50);
- icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x01);
- mdelay(50);
- value = icm20608_read_onereg(&icm20608dev, ICM20_WHO_AM_I);
- printk("ICM20608 ID = %#X\r\n", value);
- icm20608_write_onereg(&icm20608dev, ICM20_SMPLRT_DIV, 0x00); /* ����������ڲ������� */
- icm20608_write_onereg(&icm20608dev, ICM20_GYRO_CONFIG, 0x18); /* ������±2000dps���� */
- icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG, 0x18); /* ���ٶȼ�±16G���� */
- icm20608_write_onereg(&icm20608dev, ICM20_CONFIG, 0x04); /* �����ǵ�ͨ�˲�BW=20Hz */
- icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG2, 0x04); /* ���ٶȼƵ�ͨ�˲�BW=21.2Hz */
- icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_2, 0x00); /* ���ٶȼƺ������������� */
- icm20608_write_onereg(&icm20608dev, ICM20_LP_MODE_CFG, 0x00); /* �رյ��� */
- icm20608_write_onereg(&icm20608dev, ICM20_FIFO_EN, 0x00); /* �ر�FIFO */
- }
- /*
- * @description : spi������probe��������������
- * �豸ƥ���Ժ�˺����ͻ�ִ��
- * @param - client : spi�豸
- * @param - id : spi�豸ID
- *
- */
- static int icm20608_probe(struct spi_device *spi)
- {
- int ret = 0;
- /* 1������������ */
- if (icm20608dev.major) {
- icm20608dev.devid = MKDEV(icm20608dev.major, 0);
- register_chrdev_region(icm20608dev.devid, ICM20608_CNT, ICM20608_NAME);
- } else {
- alloc_chrdev_region(&icm20608dev.devid, 0, ICM20608_CNT, ICM20608_NAME);
- icm20608dev.major = MAJOR(icm20608dev.devid);
- }
- /* 2��ע���豸 */
- cdev_init(&icm20608dev.cdev, &icm20608_ops);
- cdev_add(&icm20608dev.cdev, icm20608dev.devid, ICM20608_CNT);
- /* 3�������� */
- icm20608dev.class = class_create(THIS_MODULE, ICM20608_NAME);
- if (IS_ERR(icm20608dev.class)) {
- return PTR_ERR(icm20608dev.class);
- }
- /* 4�������豸 */
- icm20608dev.device = device_create(icm20608dev.class, NULL, icm20608dev.devid, NULL, ICM20608_NAME);
- if (IS_ERR(icm20608dev.device)) {
- return PTR_ERR(icm20608dev.device);
- }
- /* ��ȡ�豸����csƬѡ�ź� */
- icm20608dev.nd = of_find_node_by_path("/soc/aips-bus@02000000/spba-bus@02000000/ecspi@02010000");
- if(icm20608dev.nd == NULL) {
- printk("ecspi3 node not find!\r\n");
- return -EINVAL;
- }
- /* 2�� ��ȡ�豸���е�gpio���ԣ��õ�BEEP��ʹ�õ�BEEP��� */
- icm20608dev.cs_gpio = of_get_named_gpio(icm20608dev.nd, "cs-gpio", 0);
- if(icm20608dev.cs_gpio < 0) {
- printk("can't get cs-gpio");
- return -EINVAL;
- }
- /* 3������GPIO1_IO20Ϊ�������������ߵ�ƽ */
- ret = gpio_direction_output(icm20608dev.cs_gpio, 1);
- if(ret < 0) {
- printk("can't set gpio!\r\n");
- }
- /*��ʼ��spi_device */
- spi->mode = SPI_MODE_0; /*MODE0��CPOL=0��CPHA=0*/
- spi_setup(spi);
- icm20608dev.private_data = spi; /* ����˽������ */
- /* ��ʼ��ICM20608�ڲ��Ĵ��� */
- icm20608_reginit();
- return 0;
- }
- /*
- * @description : spi������remove�������Ƴ�spi������ʱ��˺�����ִ��
- * @param - client : spi�豸
- * @return : 0���ɹ�;������ֵ,ʧ��
- */
- static int icm20608_remove(struct spi_device *spi)
- {
- /* ɾ���豸 */
- cdev_del(&icm20608dev.cdev);
- unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT);
- /* ע��������豸 */
- device_destroy(icm20608dev.class, icm20608dev.devid);
- class_destroy(icm20608dev.class);
- return 0;
- }
- /* ��ͳƥ�䷽ʽID�б� */
- static const struct spi_device_id icm20608_id[] = {
- {"alientek,icm20608", 0},
- {}
- };
- /* �豸��ƥ���б� */
- static const struct of_device_id icm20608_of_match[] = {
- { .compatible = "alientek,icm20608" },
- { /* Sentinel */ }
- };
- /* SPI�����ṹ�� */
- static struct spi_driver icm20608_driver = {
- .probe = icm20608_probe,
- .remove = icm20608_remove,
- .driver = {
- .owner = THIS_MODULE,
- .name = "icm20608",
- .of_match_table = icm20608_of_match,
- },
- .id_table = icm20608_id,
- };
- /*
- * @description : ������ں���
- * @param : ��
- * @return : ��
- */
- static int __init icm20608_init(void)
- {
- return spi_register_driver(&icm20608_driver);
- }
- /*
- * @description : �������ں���
- * @param : ��
- * @return : ��
- */
- static void __exit icm20608_exit(void)
- {
- spi_unregister_driver(&icm20608_driver);
- }
- module_init(icm20608_init);
- module_exit(icm20608_exit);
- MODULE_LICENSE("GPL");
- MODULE_AUTHOR(yikoulinux");


�����ѧϰjQueryʱ�Ӵ�����show()��hide()��toggle()���������������⼸������...
���Spring Controller autowired Request���� spring��DI��ұȽ���Ϥ�ˣ�����...
�����Ժ����̨����ʰ�쵵�Jetbrain��Vscode�û�����λ�����������vim����...
���µ�MySQL 8.0.23�У��������µ���Ȥ���ܣ����ɼ��С� ���ǵ�һƪ��������¹�...
��Ҫע����ǣ����õķ�װ�����ݿ⣬��jQuery�ı����ַ һ��ע�� ��1��д�ı���...
һ�������ij�������ȡ����ǩ����ͼƬ���ӣ� ���ַ�����var bgImg = "url (\" htt...
git clone֧��https��git����ssh�����ַ�ʽ����Դ�룺 ��ʹ��git��ʽ����ʱ����...
1 ���� �ڽ�������ʱ�����������ASP.NET MVC��һר�⣬����������ʱ�䣬��...
��Һ����ǰ��������������һ��˼�Ƴ���רע�ڻ�Ϊ������ ���˻�����˵��������...
��Asp.net Core֮ǰ���е�Action����ֵ����ActionResult��Json(),File()�ȷ�����...

