?SliverwaveЫФа§вэЙЬМўЗжЮі.ЫФ(НЧЖШPID)?
?SliverwaveЫФа§вэЙЬМўЗжЮі.ЫФ(НЧЖШPID)?

SliverwaveгаЫЂЫФа§вэЙЬМўЗжЮі.вЛ
Beecore Lite Silverware гаЫЂЗЩПи.дДТыНтЖС1
36дЊПеаФБЗЩПиBeecore LiteЃЈSilverwareЙЬМўЃЉ
100дЊПеаФБF3ЗЩПиЃЈBetaFlightЙЬМўЃЉ
ПЊаТПгЃКbetaflightдДТыЗжЮі(ПЊПгЦЊЃЉ
SliverwaveгаЫЂЫФа§вэЙЬМўЗжЮі.Жў(дРэЭМ)
SliverwaveЫФа§вэЙЬМўЗжЮі.Ш§(ЗфУљЦїЧ§ЖЏ)
НЧpidЕФзїгУОЭЪЧ -гУгкЫЎЦНФЃЪНЃЌвдЩшжУЫЎЦНЧПЖШЁЃ
PIDЮввВНВВЛУїАзЃЌжБНгИјФуЩЯЃК
kpЃЌБШР§ЛЗНкЪЧЮЊСЫМгПьЯьгІЫйЖШПьЫйДяЕНЮШЖЈЃЌФмМѕЩйЮѓВюЕЋВЛФмЯћГ§ЮѓВюЁЃЪЧБШР§ЕїНкЯЕЪ§ЃЌдкPIDЕїНкЦїжаЦ№ЕНМгПьЯЕЭГЕФЯьгІЫйЖШЃЌЬсИпЯЕЭГЕФЕїНкОЋЖШЃЌПьЫйЕїНкЮѓВюЕФзїгУЁЃ
kiЃЌЛ§ЗжЛЗНкЪЧЮЊСЫЯћГ§ЮШЬЌЮѓВюЃЌжЛвЊЯЕЭГгаЮѓВюЫћОЭвЛжБЛ§ЗжЃЌЮШЬЌКѓВЛЛсГіЯжЮѓВюЃЌЙ§ДѓЛсГЌЕїЃЌЕНЯћГ§ВаВюЃЌЕїНкЮШЬЌЪБМфЕФзїгУЁЃ
kdЃЌЮЂЗжЛЗНкдЄВтЮѓВюЕФЧїЪЦЃЌМѕЩйГЌЕїСПРДПЫЗўеёЕДЃЌЪЙЯЕЭГЮШЖЈадЬсИпЃЌдкPIDЕїНкЦїжаЦ№ЕНИФЩЦЯЕЭГЕФЖЏЬЌадФмЃЌдЄВтЮѓВюЧїЪЦЃЌЬсЧАаое§ЮѓВюЕФзїгУЁЃ
гаетШ§ИіЯЕЪ§ОЭКмКУНтЪЭБрГЬЪБГіЯжЕФвЛаЉБфСПСЫЁЃ
етаЉЭЗЮФМўЮвКѓУцЛсЗЂдкGithubЩЯУц
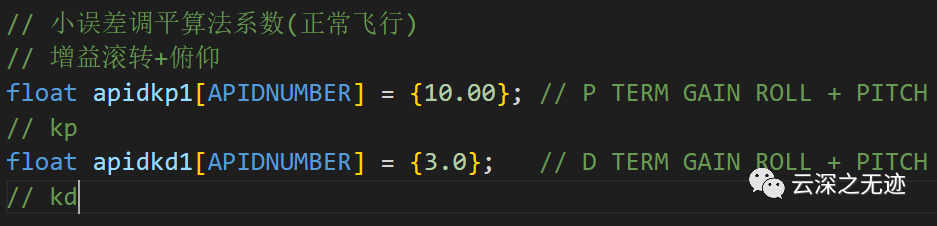
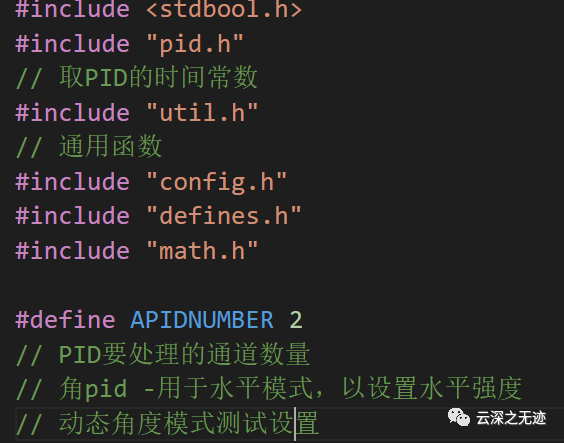
етРяОЭЪЧЯТУцвЊгУЕФPIDВЮЪ§ЃЌЩЯУцЪЧе§ГЃЗЩааЪБКђЕФВЮЪ§

етЪЧЛњЬхЪмЕНКмДѓЗљЖШЕФЖЏзїЃЌжБНгОЭЪЧkpЯЕЪ§РДПьЫйЕФЮШЖЈЛњЩэСЫ

СНИіжЕдкФГжжГЬЖШЩЯУцПЩвдвЛЦ№ЙВгУЃЌетРяОЭзїЮЊзюжеPIDЪфГіЕФЯоЗљЪ§
етИіКЏЪ§ПЩвдШЗБЃзюжеЕФЪфГіЪ§ОндкФуЕФЗЖЮЇФк
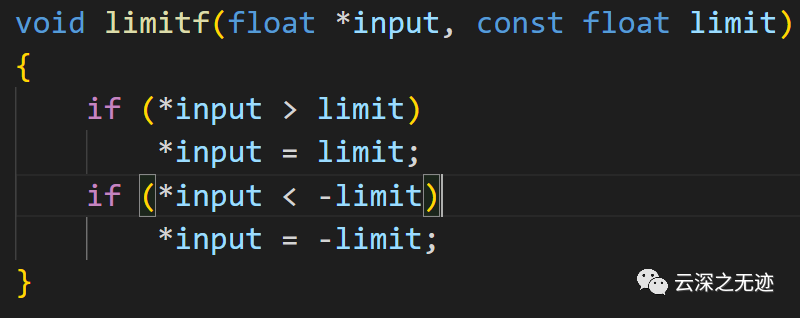
ШЗБЃPIDПижЦЕФОЋЖШЖМЪЙгУfloat

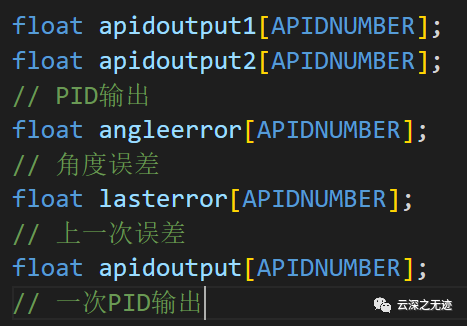
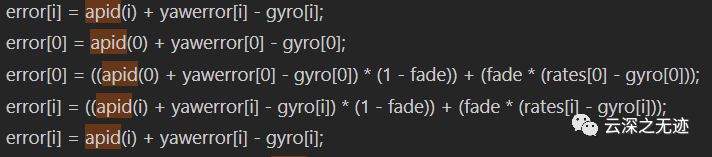
СНДЮPIDЪфГіжЕЕФМЦЫу
етИіБфСПДгPIDЕФЮФМўРяУцШЁРД

KDЪЧПижЦе№ЕДЕФЃЌОЭЪЧЬсЙЉЖЏЬЌадФм

НгзХОЭЪЧАбСНДЮЕФKDМгдквЛЦ№

АбЯждкЕФНЧЖШЮѓВюИјЕНЩЯвЛДЮЕФБфСП

БЃжЄЕїЕФВЮЪ§дкЗЖЮЇРяУцДЋГіШЅ

зюжеетИіКЏЪ§БЛЗтзАГЩетбљЃЌДЋЕНЭтУцЪЙгУЃЌАІЃЌПрБЦЕФДђЙЄКЏЪ§
етИіКЏЪ§ЕФзїгУЧјгђОЭЪЧПижЦЃЌдквЁИЫПижЦЖЫ
https://miaowlabs.com/book/lite/E02.htmlhttps://blog.csdn.net/lichenda/article/details/106874752БОЮФЗжЯэзд дЦЩюжЎЮоМЃ ЮЂаХЙЋжкКХЃЌЧАЭљВщПД
ШчгаЧжШЈЃЌЧыСЊЯЕ cloudcommunity@tencent.com ЩОГ§ЁЃ
БОЮФВЮгы?ЬкбЖдЦздУНЬхЗжЯэМЦЛЎ? ЃЌЛЖгШШАЎаДзїЕФФувЛЦ№ВЮгыЃЁ