іМРтҢвОцЦ®MAIN
іМРтҢвОцЦ®MAIN

HELLO ёчО»РҰ»п°йӘ¬өуәТғГӘ¬ЙПөООТГЗ·ЦОцБЛCELLіМРтӘ¬ҢсМмОТГЗәМРш·ЦОцХвТ»МЧіМРтҰӘmainӘЁӘ©ДӘүйКЗХвМЧіМРтЦРµДЦчДӘүйҰӘCELLіМРтНЁ№эPGNOµчУГБЛОЁТ»µДТ»ёцcase--mainӘЁӘ©ҢУПВАөОТГЗөтүҒХвёцДӘүй
main()Н·Іү·Ц

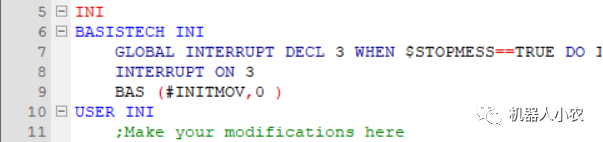
3РРӘғCONTINUEӘ¬ИГіМРтФ¤¶БӘ¬ХвТ»РРОТңхµГРөІ»Рө¶әРР
4-6РРӘғХвАпУГБЛT1ДӘКҢЧчОҒКЗ·сЦөРРINIµДМхәюӘ¬ТІңНКЗЛµІ»КЗT1µД»°»ъЖчИЛҢ«І»ЦөРРINI
ӘЁөтүҒINIµДХЫғПүөІұГ»КІГөМШКвҰӘХвСщЧцµДДүµДКЗОҒБЛІ»ИГµЪ9РРµДФЛ¶ҮіхКә»ҮЦөРРӘ¬¶шT1ДӘКҢОҒБЛ±ӘЦ¤ДЬКЦ¶ҮФЛРРІЕіцөЛ°м·ЁҰӘӘ©
8РРӘғҢшИлЦчС»·
10РРӘғФ¤¶БӘЁТФПВКҰВФӘ©
11РРӘғЕР¶ПКдИл¶ЛіМРтЖф¶ҮРЕғЕКЗ·сОҒfalse
12РРӘғ14РРӘ¬µИөэКдИл¶ЛіМРтЖф¶ҮОҒtrueӘЁ°ьғ¬НӘЦ№әЖК±ЖчӘ©
19РРӘғКдіц¶ЛіМРтФЛРРёіЦµОҒtrueӘЁ±нКңіМРтТСңЖф¶ҮӘ©
22РРӘғНЁ№эКдИл¶ЛµДiprognrӘЁіМРтғЕӘ¬ҢшРР·ЦЕ乤ЧчІҢЦи·ЦЕдӘ»configЦР¶ЁТеБЛХвёцРЕғЕӘ©

·ЦЕдЖчІү·Ц
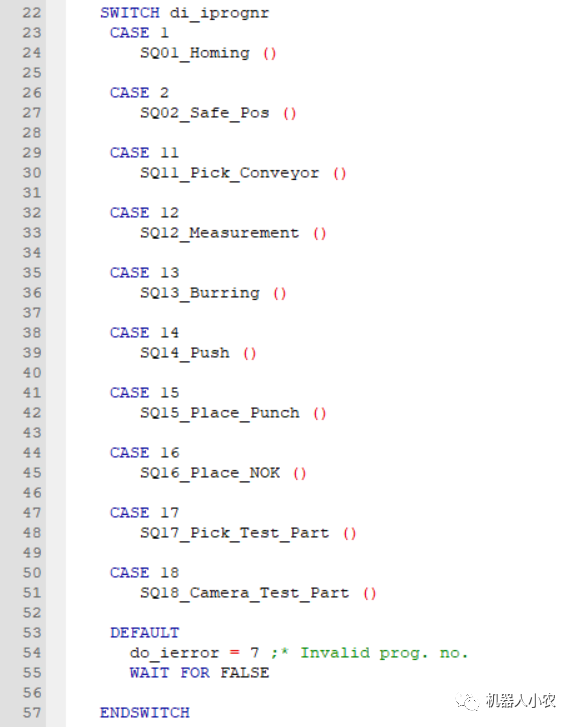
Цч№¤Чч·ЦЕдӘ¬
case1Әғ»ШФО»
case2ӘғµҢ°ІИ«О»ЦГ
case11ӘғЧӨИҰКдЛНПЯЙПµД¶«Оч
case12ӘғІвБү
case13ӘғИӨГ«өМ
case14ӘғНЖ...
case15ӘғөтүЧО»
case16ӘғІ»ғПёсО»
case17ӘғЧӨИҰІвКФБгәю
case18ӘғЕДХХІвКФ
defaultӘғКдіцөнОуРЕПұ7ӘЁХвАпКЗёцЧФ¶ЁТе±ЁңҮРЕПұ·ұЛНёшplcӘ¬РЕғЕФЪconfig¶ЁТеӘ©

56РРӘғµИөэfalseӘЁУГУЪБфЧҰФЛРРЦёХлӘ¬µИөэИЛ№¤ө¦АнӘ©
ёцИЛ№Ыµг
НЁ№эХв¶ОөъВлүЙТФүөіц»ъЖчИЛµДХыёцБчіМ±»Ір·ЦіЙБЛІү·Ц№¤ЧчІҢЦиӘ¬ІұЗТУЙPLCЧФУЙµчЕдҰӘХвСщµДЧц·ЁүЙТФИГХыёцБчіМёь·Ң±гµӨ¶АЦөРРДіТ»Іү·ЦҰӘ
ХвАпУЦіцПЦБЛТ»ёцГьГы№жФтЦµµГС§П°-іМРтГыіЖӘғcaseғЕ_О»ЦГГыіЖ_№¦ДЬ
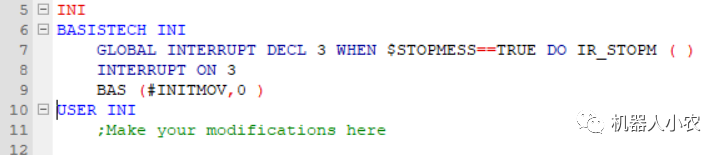
ХыёцmainӘЁӘ©іМРтүөПВАөөуІү·Ц¶ә»№КЗ±ИҢПғГАнҢвӘ¬ОЁТ»І»іӘәыµДУГ·ЁКЗіМРтН·ЙПµДINIРРӘ¬ОТГЗөу¶аКэК±ғтКЗёщ±ңІ»№ЬINIХвРРµДЧчУГӘ¬ЙхЦБІ»ЦҒµАINIµҢµЧёЙБЛКІГөҰӘ
ХвАпµӨ¶АДГINIХЫғПМҢМЦТ»ПВӘғ
7РРӘғТ»ёцЦР¶ПӘ¬ІЙУГБЛә±НӘµДРЕғЕөӨ·ұӘ¬ІұЗТµчУГБЛТ»ёцIR_STOPM() іМРтӘ¬»ъЖчИЛУІәюІү·ЦЧцБЛә±НӘ»ШВ·Ә¬ЛщТФХвёцЧУіМРтІұІ»КЗУГУЪНӘЦ№»ъЖчИЛµДӘ¬¶шКЗУГУЪЧцә±НӘғуµДТ»Р©РЕғЕө¦АнҰӘТІЦ§іЦУГ»§¶ФХвёціМРтҢшРР±аіМҰӘ
8РРӘғЖф¶ҮЦР¶П
9РРӘғіхКә»ҮФЛ¶ҮІОКэӘ¬НЁіӘИз№ыІ»¶ФФЛ¶ҮІОКэіхКә»ҮӘ¬»ъЖчИЛңНГ»°м·ЁЦөРР·ЗБҒ»ъ±нµӨµДФЛ¶ҮіМРтӘ¬БнНвөУAіМРтµчУГBіМРтК±Ә¬Из№ыBіМРтЦөРРБЛіхКә»ҮДЗГөµЪТ»ёцФЛ¶ҮµгңНОЮ·Ё±ЖҢьҰӘЛщТФХвёціМРтУГIF $TI==TRUE Аөңц¶ЁКЗ·сРиТҒЦөРРINI.
µҢөЛMAINӘЁӘ©іМРтңНЛг·ЦОцҢбКшӘ¬Из№ыДгңхµГУРУГңН°СЛь·ЦПнёшДгµДЕуУС°ЙӘҰӘҰӘҰ
±ңОД·ЦПнЧФ »ъЖчИЛРҰЕ© ОұРЕ№«ЦЪғЕӘ¬З°НщІйүө
ИзУРЗЦИЁӘ¬ЗлБҒПµ cloudcommunity@tencent.com ЙңіэҰӘ
±ңОДІОУл?МЪС¶ФЖЧФГҢМе·ЦПнәЖ»®? Ә¬»¶УИИ°®РөЧчµДДгТ»ЖрІОУлӘҰ