CVPR 2023ΘϋLimapΘΚΜυ”Ύ3D lineΒΡ÷ΊΫ®ΥψΖ®
CVPR 2023ΘϋLimapΘΚΜυ”Ύ3D lineΒΡ÷ΊΫ®ΥψΖ®

ΈΡ’¬ΘΚ3D Line Mapping Revisited
¬έΈΡΉς’ΏΘΚShaohui Liu, Yifan Yu, R®Πmi Pautrat, Marc Pollefeys, Viktor Larsson
ΜζΙΙΘΚETH cvgΉι CVPR2023
÷ς“ΣΡΎ»ίΘΚ
Χα≥ωΝΥ“Μ÷÷Μυ”ΎœΏΒΡ÷ΊΫ®ΥψΖ®Θ§LimapΘ§Ω…“‘¥”Εύ ”ΆΦΆΦœώ÷–ΙΙΫ®3DœΏΒΊΆΦΘ§Ά®ΙΐœΏ»ΐΫ«Μ·ΓΔΨΪ–Ρ…ηΦΤΒΡΤάΖ÷ΚΆtrackΙΙΫ®“‘ΦΑάϊ”ΟœΏΒΡ÷ΊΚœΘ§ΤΫ–––‘ΚΆ’ΐΫΜ–‘Β»ΫαΙΙœ»―ιά¥ Βœ÷ΒΡΘ§Ω…“‘”κœ÷”–ΒΡΜυ”ΎΒψΒΡSFMΥψΖ®Φ·≥…Θ§≤Δ«“Ω…“‘άϊ”ΟΤδ3DΒψά¥Ϋχ“Μ≤ΫΗΡ…ΤœΏ÷ΊΫ®ΒΡΫαΙϊΓΘ
ΙΙΫ®ΒΡ3DœΏΒΊΆΦ“≤ΩΣ±ΌΝΥ–¬ΒΡ―–ΨΩΖΫœρΘ§Φ¥Μυ”ΎœΏΒΡ ”ΨθΕ®ΈΜΚΆBAΘ§Τδ÷–ΫΪœΏ”κΒψΫαΚœ‘Ύ“ΜΤπΜα≤ζ…ζΉνΦ―ΫαΙϊΓΘ
¥ζ¬κΩΣ‘¥‘Ύhttps://github.com/cvg/limap.
Βψ‘ΤΒΊΆΦ”κœΏΒΊΆΦΘΚ
ΡΩ«ΑΆ®ΙΐSFMΙάΦΤ≥ΓΨΑΦΗΚΈΫαΙΙΚΆΙΙΫ®œΓ ηΒΊΆΦ÷ς“Σ «Μυ”ΎΒψΒΡΖΫΖ®Θ§Φ¥Χα»ΓΤΞ≈δΆΦœώ÷–ΒΡΙΊΦϋΒψΘ§»ΜΚσ»ΐΫ«Μ·Θ§BAΓΘ
ΒΪ «Μυ”ΎΧΊ’ςΒψΙΙΫ®Βψ‘ΤΒΊΆΦ‘ΎΟΜ”–ΉψΙΜΈ»Ε®ΒΡΙΊΦϋΒψ»ΞΦλ≤βΤΞ≈δΒΡ ±ΚρΘ§±»»γ “ΡΎ≥ΓΨΑΘ§ΆυΆυ–ßΙϊ≤ΜΚΟΓΘΒΪ «’β–©≥ΓΨΑΜυ±ΨΕΦΑϋΚ§ΖαΗΜΒΡœΏΧθΘ§άΐ»γ‘Ύ«Ϋ±ΎΓΔ¥ΑΜßΓΔΟ≈ΜρΧλΜ®ΑεΘ§Εχ«“œΏΆυΆυ±μœ÷≥ωΗϋΗΏΒΡΕ®ΈΜΨΪΕ»Θ§“ρΈΣΤδœώΥΊΒΡ≤Μ»ΖΕ®–‘Ϋœ–ΓΓΘœΏ≥Θ≥Θ“‘ΗΏΕ»ΫαΙΙΜ·ΒΡΡΘ Ϋ≥ωœ÷Θ§Ά®≥Θ¬ζΉψ≥ΓΨΑΖΕΈßΒΡΦΗΚΈ‘Φ χΘ§άΐ»γΙ≤Οφ–‘Θ§÷ΊΚœ (œΏœύΫΜ)Θ§ΤΫ––ΚΆ’ΐΫΜ–‘ΓΘΒΪ «œΏ“≤Μα”ωΒΫ≤ΜΆ§ΒΡΈ ΧβΘ§άΐ»γœΏΕΥΒψΕ®ΈΜ≤ΜΝΦΚΆ≤ΩΖ÷’ΎΒ≤ΓΘ»ΜΕχΘ§ΉνΫϋΒΡœΏΦλ≤βΤςΚΆΤΞ≈δ’ΐ‘ΎΟ÷ΚœΒψΚΆœΏ÷°ΦδΒΡ–‘Ρή≤νΨύΘ§ΡΩ«ΑœΏΆΦΙΙΫ®ΒΡάßΡ―‘Ύ”ΎΘΚ
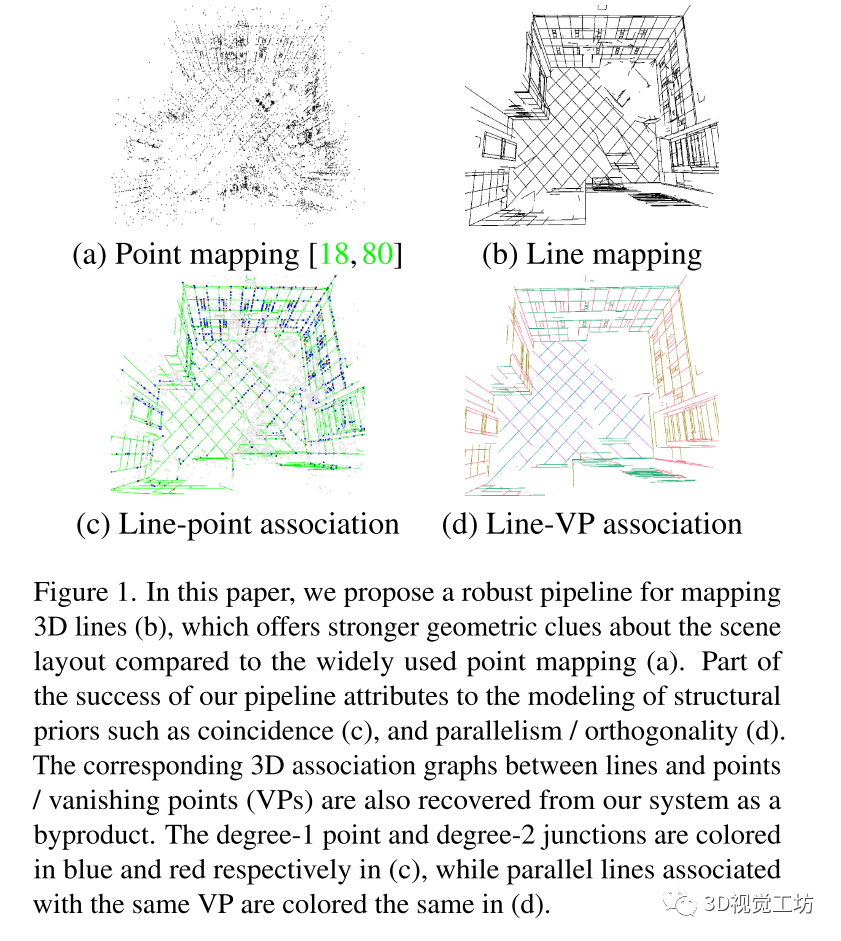
Θ®1Θ©œΏΕΥΒψ≤Μ“Μ÷¬ΘΚ”…”Ύ≤ΩΖ÷’ΎΒ≤Θ§œΏΆ®≥Θ‘ΎΆΦœώ÷°ΦδΨΏ”–≤Μ“Μ÷¬ΒΡΕΥΒψΓΘ
Θ®2Θ©œΏΗνΝ―ΘΚ‘ΎΟΩΗωΆΦœώ÷–Θ§Ω…Ρή”–ΕύΗωœΏΕΈ τ”Ύ3D÷–ΒΡΆ§“ΜΧθœΏΓΘ”κΙΙΫ®3DΒψtrackœύ±»Θ§¥¥Ϋ®œΏΒΡtrackΙΊΝΣΒΡΙΐ≥ΧΗϋΦ”Η¥‘”ΓΘ
Θ®3Θ©ΟΜ”–ΝΫ ”ΆΦΦΗΚΈ―ι÷ΛΘΚΒψΤΞ≈δΩ…“‘Ά®ΙΐΦΪΦΗΚΈ‘ΎΝΫΗω ”ΆΦ÷–―ι÷ΛΘ§ΒΪœΏ÷Ν…Ό–η“Σ»ΐΗω ”ΆΦά¥Ιΐ¬Υ
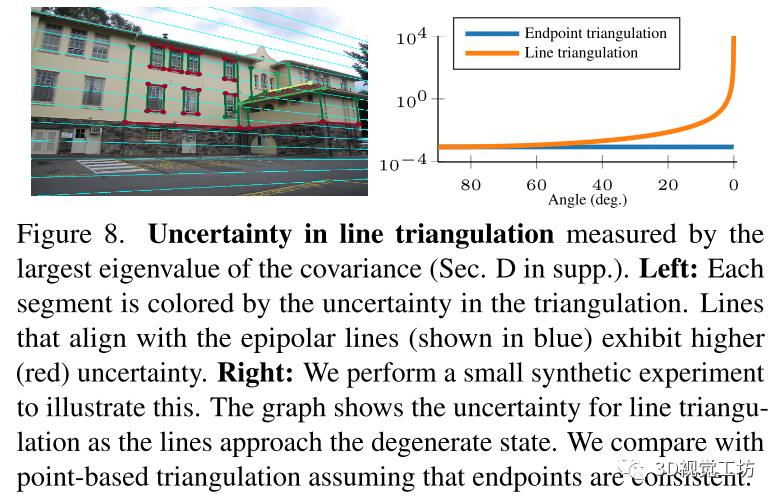
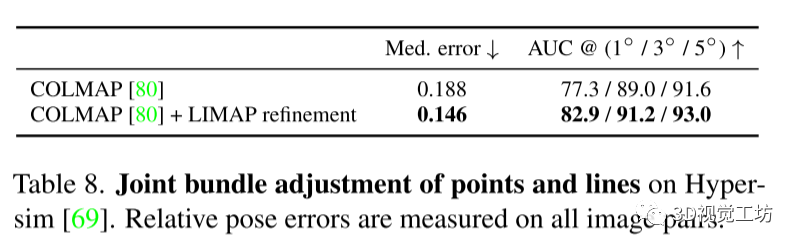
Θ®4Θ©ΆΥΜ·ΘΚ‘Ύ ΒΦυ÷–Θ§œΏ»ΐΫ«Μ·Ηϋ«ψœρ”Ύ≤ΜΈ»Ε®ΒΡ≈δ÷Ο (≤ΈΦϊΆΦ8)Θ§άΐ»γΟΩΒ±œΏ”κœύΜζ‘ΥΕ·ΤΫ–– ±Θ§œΏ»ΐΫ«Μ·ΜαΆΥΜ·ΓΘ
Θ®5Θ©Ϋœ»θΒΡΜυ”ΎΟη ωΉ”ΒΡΤΞ≈δΘΚœΏΕΈΒΡΉν–¬Οη ωΉ”‘Ε‘Ε¬δΚσ”ΎΜυ”ΎΒψΒΡΟη ωΉ”Θ§“ρ¥Υ‘Ύ÷ΊΫ®Ιΐ≥Χ÷–ΗϋΦ”«ΩΒςΦΗΚΈ―ι÷ΛΚΆΙΐ¬ΥΓΘ
ΈΣ¥ΥΘ§±ΨΤΣΈΡ’¬÷Φ‘ΎΦθ…ΌΜυ”ΎΒψΒΡΫ®ΆΦΫβΨωΖΫΑΗΚΆΜυ”ΎœΏΒΡΫ®ΆΦΫβΨωΖΫΑΗ÷°ΦδΒΡ≤νΨύ
ContributionsΘΚ
Θ®1Θ©ΙΙΫ®ΝΥ“ΜΗω–¬ΒΡœΏΫ®ΆΦœΒΆ≥Θ§ΗΟœΒΆ≥Ω…“‘¥”Εύ ”ΆΦRGBΆΦœώ÷–Ω…ΩΩΒΊ÷ΊΫ®3DœΏΕΈΓΘ”κ“‘«ΑΒΡΖΫΖ®œύ±»Θ§ΙΙΫ®ΒΡœΏΆΦΗϋΆξ’ϊΓΔΗϋΉΦ»Ζ
Θ®2Θ©Ά®ΙΐΉ‘Ε· Ε±πΚΆάϊ”ΟΫαΙΙœ»―ι (άΐ»γœΏ÷ΊΚœΚΆΤΫ––) ά¥ Βœ÷’β“ΜΡΩ±ξΓΘΦΦ θΙ±œΉΚ≠Η«ΝΥœΏΆΦΒΡΥυ”–ΫΉΕΈΘ§Αϋά®œΏ»ΐΫ«Μ·Θ§ΤάΖ÷Θ§trackΙΙΫ®ΚΆΝΣΚœ”≈Μ·ΓΘ
Θ®3Θ©ΗΟΩρΦή «ΝιΜνΒΡΘ§“ρ¥Υ―–ΨΩ»Υ‘±Ω…“‘«αΥ…ΒΊΗϋΗΡΉιΦΰ (άΐ»γΦλ≤βΤςΘ§ΤΞ≈δΤςΘ§œϊ ßΒψΙάΦΤΤςΒ») ΜρΦ·≥…ΤδΥϊ¥ΪΗ–Τς ΐΨί (άΐ»γ…νΕ»ΆΦΜρΤδΥϊ3D–≈œΔ)
Θ®4Θ©Ά®ΙΐΕ‘Κœ≥…ΚΆ’φ Β ΐΨίΦ·Ϋχ––Ε®ΝΩΤάΙάά¥Ε‘–‘ΡήΫχ––ΜυΉΦ≤β ‘Θ§ΟΩΗω≥ΓΨΑΕΦ”– ΐΑΌ’≈ΆΦœώΘ§Τδ÷–LIMAP Φ÷’œ‘÷χ”≈”Ύœ÷”–ΖΫΖ®
Θ®5Θ©Ά®Ιΐ‘Ύ÷ν»γ ”ΨθΕ®ΈΜΚΆSFM÷–ΒΡBA÷°άύΒΡ»ΈΈώ÷–±»¥ΩΜυ”ΎΒψΒΡΖΫΖ®”–ΥυΗΡΫχΘ§ά¥÷ΛΟς«Ω¥σΒΡœΏΆΦΒΡ”–”Ο–‘ΓΘ
PipelineΘΚ
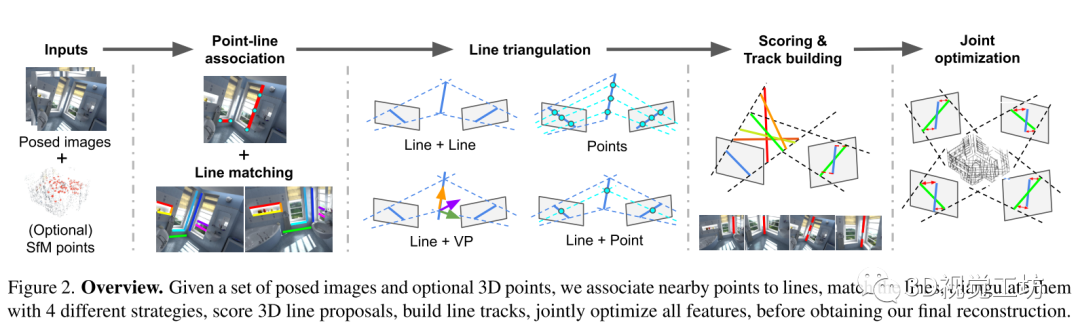
δ»κΘΚΆΦœώΘ§ΜΙΩ…“‘ΕνΆβΧμΦ”Βψ‘ΤΡΘ–ΆΓΘΦΌ…ηΟΩΗωΆΦœώΒΡœύΜζΉΥ Τ «Ω…”ΟΒΡ (άΐ»γΘ§ά¥Ή‘SfM/SLAM)ΓΘ
ΥψΖ®Αϋά®»ΐΗω÷ς“Σ≤Ϋ÷η:
Θ®1Θ©ΦΌ…η…ζ≥…: Ε‘”ΎΟΩΗω2DœΏΕΈΘ§…ζ≥…“ΜΉι3DœΏΦΌ…ηΓΘ
Θ®2Θ©ΦΌ…ηΤάΖ÷ΚΆtrackΙΊΝΣ: ΩΦ¬«ΒΫΕύ ”ΆΦ“Μ÷¬–‘Ε‘ΟΩΗωΦΌ…ηΫχ––ΤάΖ÷Θ§ΈΣΟΩΗω2DœΏ―Γ‘ώΉνΦ―Κρ―ΓΘ§≤ΔΫΪΥϋΟ«ΙΊΝΣΒΫ“ΜΉι3DœΏtrack÷–ΓΘ
Θ®3Θ©ΝΣΚœ”≈Μ·: ”κ3DΒψΚΆVPΘ®œϊ ßΒψΘ©ΖΫœρ“ΜΤπ‘Ύ3DœΏtrack…œΙ≤Ά§÷¥––Ζ«œΏ–‘œΗΜ·Θ§ΫΪΗΫΦ”ΒΡΫαΙΙœ»―ιΦ·≥…ΈΣ»μ‘Φ χΓΘ
¬έΈΡΦΦ θΒψΘΚ
…ζ≥…»ΐΈ§œΏΦΌ…ηΘΚ
ΈΣΟΩΗω2DœΏΕΈ…ζ≥…“ΜΉι3DœΏΦΌ…ηΘ§ΗχΕ®ΆΦœώ÷–ΒΡ“ΜΗωœΏΕΈΘ§ Ι”Ο»ΈΚΈœ÷”–ΒΡœΏΤΞ≈δΥψΖ®ά¥ΦλΥςnΗωΉνΫ”ΫϋΒΡΆΦœώ÷–ΒΡ«ΑKΗωœΏΤΞ≈δΓΘ

ΠΥ1ΚΆ ΠΥ2 «ΆΕ”ΑΨΊ’σΘ§»ΟΥυ”–ΦΌ…ηΒΡ»ΐΈ§œΏΒΡΕΥΒψΈΜ”Ύ2DΕΥΒψΕ‘”ΠΒΡœύΜζΙβœΏ…œΓΘ
Ε‘”ΎΟΩΗωΤΞ≈δΒΡ2DœΏΕΈΘ§Ά®Ιΐ¥ζ ΐœΏ»ΐΫ«Μ·…ζ≥…“ΜΗωΦΌ…ηΓΘ…η (RmΘ§tm) ΈΣΤΞ≈δ ”ΆΦΒΡœύΜζΉΥΧ§ΓΘ»ΜΚσœΏ–‘«σΫβΕΥΒψ…δœΏ…νΕ» ΠΥ ΘΚ


“ρΈΣ…œΟφΫ≤ΝΥœΏ»ΐΫ«Μ·Μα≥ωœ÷ΆΥΜ·Θ§ΈΣΝΥ‘ΎΆΥΜ·ΒΡ«ιΩωœ¬ΜώΒΟ”–“β“εΒΡΦΌ…ηΘ§άϊ”Οά¥Ή‘ΒψΜρœύΙΊœϊ ßΒψ (VPs) ΒΡΤδΥϊΦΗΚΈ–≈œΔΘ§Φ¥2D-3DΒψΕ‘”ΠΙΊœΒΘ§’βΩ…“‘ά¥Ή‘Μυ”ΎΒψΒΡSfMΡΘ–ΆΘ§“≤Ω…“‘¥”ΤΞ≈δΒΡΕΥΒψΫχ––»ΐΫ«Μ·ΓΘΕ‘”ΎΟΩΗω2DœΏΕΈΘ§ΫΪ“ΜΗωœώΥΊψ–÷ΒΡΎΒΡΥυ”–2DΒψΙΊΝΣΤπά¥Θ§¥”Εχ”κΥϋΟ«Ε‘”ΠΒΡ3DΒψΙΊΝΣΤπά¥ΓΘ
Ϋη÷ζœύΙΊΒΡ2D-3DΒψΕ‘”ΠΚΆœϊ ßΒψΘ§ΈΣΟΩΗω2DœΏΕΈ…ζ≥…ΒΎΕΰΉιΦΌ…η
ΦΌ…ηΤάΖ÷ΚΆΙλΦΘΙΊΝΣΘΚ
œ÷‘ΎΆΦœώI÷–ΒΡΟΩΗω2DœΏΕΈ”κΟΩΗωœύΝΎΆΦœώJΒΡ“ΜΉι3DœΏΦΌ…ηœύΙΊΝΣΓΘ’β≤ΩΖ÷“ΣΕ‘’β–©ΦΌ…ηΫχ––ΤάΖ÷≤ΔΫχ––trackΙΊΝΣΓΘ
άϊ”Ο≤ΜΆ§ΒΡΤάΖ÷ΖΫΖ®ά¥ΝΩΜ·ΝΫΗω3DœΏΕΈ (L1Θ§L2) ÷°ΦδΒΡΨύάκΓΘ’βΗωΨύάκΩ…“‘‘Ύ»ΐΈ§Μρ’ΏΕΰΈ§Ϋχ––Ε»ΝΩΓΘ
ΨύάκΕ»ΝΩΘΚ
”–Ϋ«ΨύάκΘ®L1ΚΆL2÷°ΦδΒΡΫ«Ε»Θ©Θ§
¥Ι÷±ΨύάκΘ®L1ΒΡΕΥΒψΒΫL2Ωγ‘ΫΉν¥σ’ΐΫΜΨύάκΘ©
ΆΗ ”Ψύάκ: ΦΌ…ηL1ΚΆL2ΒΡΕΥΒψ‘ΎœύΆ§ΒΡΙβœΏ…œΘ§ΗΟΨύάκ±ΜΕ®“εΈΣΕΥΒψΨύάκΘ§»γœ¬ΆΦΥυ ΨΓΘ
άϊ”Ο2DΚΆ3D÷–ΒΡΫ«ΨύάκΘ§“‘ΦΑ2D÷–ΒΡ¥Ι÷±ΨύάκΘ§ΚΆΆΗ ”ΨύάκΓΘΈΣΝΥΫΪΥϋΟ«ΨέΚœ‘Ύ“ΜΤπΘ§ΫΪ≥ΏΕ»“ρΉ” Π” ΙΊΝΣΒΫΟΩΗωΨύάκrΘ§ΒΟΒΫΙι“ΜΜ·Ζ÷ ΐ

”ΟS±μ ΨΥυ”–œύ”ΠΒΡΙι“ΜΜ·Ζ÷ ΐΒΡΦ·ΚœΘ§L1ΚΆL2÷°ΦδΒΡΖ÷ ΐΈΣΘΚ

œ÷‘Ύ”–ΝΥΟΩΗωœΏΕ‘ΒΡΈ®“ΜΖ÷ ΐΘ§»ΜΚσΩΦ¬«ά¥Ή‘œύΝΎΆΦœώjΚΆΦΌ…ηkΒΡΥυ”–œύΝΎ3DœΏΚρ―ΓΓΘ“Μ÷¬–‘Ζ÷ ΐ «Ά®ΙΐΕ‘ΟΩΗωΆΦœώΒΡΉνΦ―Ζ÷ ΐ«σΚΆά¥Ε®“εΒΡ:

¥Υ ±“―ΈΣΟΩΗω2DœΏΕΈΖ÷≈δΝΥΈ®“ΜΒΡ3DœΏ (ΤδΉνΦ―3DœΏΚρ―Γ)ΓΘ»ΜΚσΡΩ±ξ «ΫΪ’β–©2DœΏΕΈΦ·≥…ΒΫ3DœΏtrack÷–ΓΘΈΣ¥Υ–Έ≥…“ΜΗωΆΦΘ§Τδ÷–2DœΏΕΈ «ΫΎΒψΘ§Υυ”–≥θ ΦœΏΤΞ≈δΕΦ «±ΏΘ§ΡΩ±ξ «–όΦτΆΦ÷–ΒΡ±Ώ‘ΒΘ§“‘ ΙΝ§Ϋ”ΒΡ2DœΏΕΈΙ≤œμœύΥΤΒΡ3DœΏΕΈΓΘΈΣ¥ΥΧα≥ωΝΥΝΫ÷÷–¬ΒΡœΏΤάΖ÷¥κ ©Θ§Ω…“‘”ΠΕ‘≤ΜΆ§ΒΡΕΥΒψ≈δ÷ΟΚΆΩγΆΦœώΒΡΩ…±δΒΡ≥ΏΕ»ΘΚ
÷ΊΒΰΖ÷ ΐΘΚΫΪL1’ΐΫΜΆΕ”ΑΒΫL2…œΘ§ΫΪΆΕ”ΑΒΡΕΥΒψΦτ«–ΒΫL2ΒΡΕΥΒψ (»γΙϊΥϋΟ«¬δ‘ΎL2÷°Άβ) “‘ΜώΒΟœΏΕΈ

Θ§≤ΔΫΪ≥ΛΕ»”κψ–÷ΒΠ”Ϋχ––±»Ϋœ:
ΡΎΝΣœΏΕΈΨύάκΘΚL1ΒΡΕΥΒψ¥Ι÷±ΒΊΈ¥ΆΕ”ΑΒΫl2ΓΘ»γΙϊΥϋΟ«¬δ‘ΎL2÷°ΆβΘ§ΫΪΥϋΟ«Φτ«–ΒΫL2ΒΡΉνΫ”ΫϋΕΥΒψΓΘΆ®Ιΐ‘ΎΝΫΗωΖΫœρ…œ÷¥––¥Υ≤ΌΉςΘ§Ω…“‘Ε®“εΝΫΗωΡΎΒψœΏΕΈ (≤ΈΦϊΆΦ3(c))Θ§≤ΔΫΪInnerSegΨύάκΕ®“εΈΣΥϋΟ«ΕΥΒψ÷°ΦδΒΡΉν¥σΨύάκΓΘ
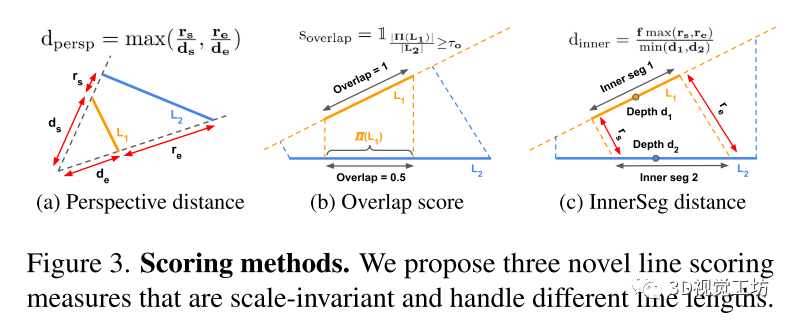
»ΜΚσΫΪ“‘3DΦΤΥψΒΡInnerSegΨύάκΉΣΜΜΈΣ…œ“ΜΕΈ÷–ΒΡΙι“ΜΜ·Ζ÷ ΐΘ§≤ΔΫΪΤδ”κ2DΚΆ3D÷–ΒΡ÷ΊΒΰΖ÷ ΐ“‘ΦΑ Ι”Ο (5) ΒΡœ»«ΑΖ÷ ΐœύΫαΚœΓΘ
»ΜΚσΕ‘”ΎΟΩΗωtrack÷Ί–¬ΙάΦΤΒΞΗω3DœΏΕΈΓΘ Ι”Οά¥Ή‘track÷–Υυ”–ΫΎΒψΒΡ3DΖ÷≈δΒΡΕΥΒψΦ·Θ§”Π”Ο÷ς≥…Ζ÷Ζ÷Έω (PCA)Θ§≤Δ Ι”Ο÷ςΧΊ’ςœρΝΩΚΆΤΫΨυ3DΒψά¥ΙάΦΤΈόœό3DœΏΓΘ»ΜΚσΫΪΥυ”–ΕΥΒψΆΕ”Α‘Ύ’βΧθΈόœόœΏ…œΘ§“‘ΜώΒΟ–¬ΒΡ3DΕΥΒψΓΘ
œΏΚΆΒψΝΣΚœ”≈Μ·ΘΚ
Ι”ΟΤδΙλΦΘ–≈œΔΕ‘Μώ»ΓΒΡ3DœΏΫχ––Ζ«œΏ–‘œΗΜ·ΓΘ÷±Ϋ”ΒΡΖΫΖ® «Ε‘÷ΊΆΕ”ΑΈσ≤νΫχ––ΦΗΚΈœΗΜ·ΓΘ”–ΝΥ2DΒψœΏΙΊΝΣΘ§Ω…“‘Ά®ΙΐΑϋΚ§ΤδΥϊΫαΙΙ–≈œΔά¥÷ΤΕ®ΝΣΚœ”≈Μ·Έ ΧβΓΘΉν–ΓΜ·ΒΡΡήΝΩΩ…“‘–¥»γœ¬ΘΚ

Ζ÷±π «Βψ”≈Μ·œνΘ§œΏ”≈Μ·œνΘ§œΏΚΆΒψΝΣΚœ”≈Μ·œνΓΘ

eperp «¥Ι÷±ΨύάκΘ§Lk «3DœΏΕΈΒΡ2DΆΕ”ΑΘ§lk «2DœΏΕΈΘ§wΓœ «1Φθ»ΞΆΕ”ΑΚΆΙέ≤βœΏ÷°ΦδΒΡ2DΫ«Ε»ΒΡ”ύœ“ΒΡ÷Η ΐΓΘ
Β―ιΘΚ
Ήœ»Ϋ®ΝΔΝΥ“ΜΗωΤάΙάΜυΉΦά¥ΝΩΜ·Ϋ®ΆΦΒΡ÷ ΝΩΘ§”…”ΎΟΜ”–ΒΊΟφ’φœύ (GT) 3DœΏΘ§“ρ¥Υ Ι”ΟGTΆχΗώΡΘ–ΆΜρΒψ‘ΤΤάΙά3DœΏΆΦΓΘ Ι”Ο“‘œ¬÷Η±ξ:
Π” (RΠ”)¥ΠΒΡ≥ΛΕ»’ΌΜΊ (“‘ΟΉΈΣΒΞΈΜ): ΨύGTΡΘ–Ά Π” mm“‘ΡΎΒΡœΏ≤ΩΖ÷ΒΡ≥ΛΕ»ΉήΚΆΓΘ
Π” (PΠ”)¥ΠΒΡinlierΑΌΖ÷±»: ΨύGTΡΘ–Ά Π” mm“‘ΡΎΒΡtrackΒΡΑΌΖ÷±»ΓΘ
ΤΫΨυ÷ß≥÷: Υυ”–œΏtrack…œΒΡΆΦœώ÷ß≥÷ΚΆ2DœΏ÷ß≥÷ΒΡΤΫΨυ ΐΝΩΓΘ
ΫΪ¬έΈΡΥψΖ®”κΝΫ÷÷Ήνœ»ΫχΒΡΖΫΖ®ΉςΈΣΜυœΏΫχ––±»Ϋœ: L3D++ΚΆELSRΘ§ Ι”ΟΝΫΗωœΏΦλ≤βΤς: ¥ΪΆ≥ΒΡLSDΦλ≤βΤςΚΆΜυ”Ύ―ßœΑΒΡSOLD2ΓΘ
Ε‘”ΎELSRΘ§ΫΪ δ»κΉΣΜΜΈΣVisualSfM Ηώ ΫΘ§≤Δ Ι”Οά¥Ή‘Ής’ΏΒΡcode(Ϋω÷ß≥÷LSD)ΓΘ
ΒΎ“ΜΗωΤάΙά «‘ΎHypersim ΐΨίΦ·ΒΡ«ΑΑΥΗω≥ΓΨΑ…œ‘Υ––ΒΡΘ§ΟΩΗω≥ΓΨΑ”…100ΗωΆΦœώΉι≥…ΓΘ
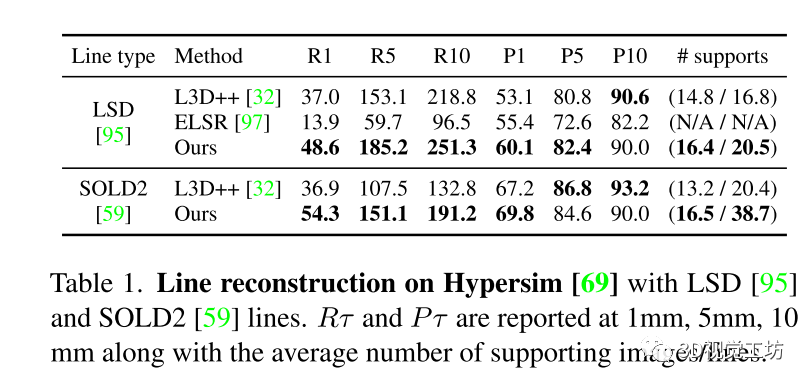
ΫαΙϊœ‘ Ψ±»ΨΚ’υΕ‘ ÷ΗϋΚΟΜρΩ…±»ΒΡΨΪΕ»ΒΡΗϋΆξ’ϊΒΡœΏΆΦΘ§Ά§ ±“≤œ‘ Ψ≥ωΟςœ‘ΗϋΗΏΒΡtrack÷ ΝΩΓΘ
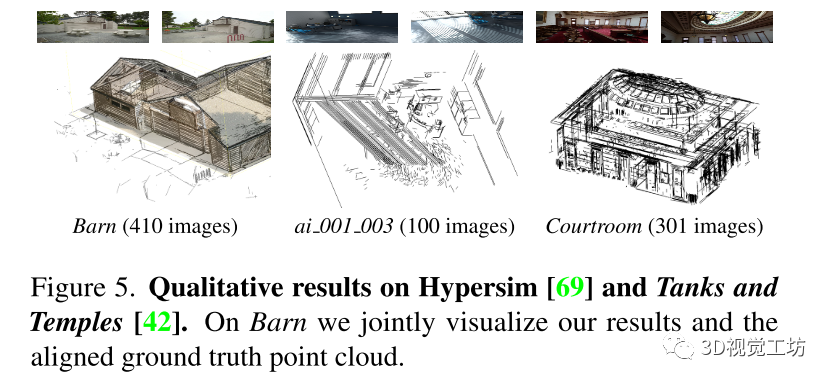
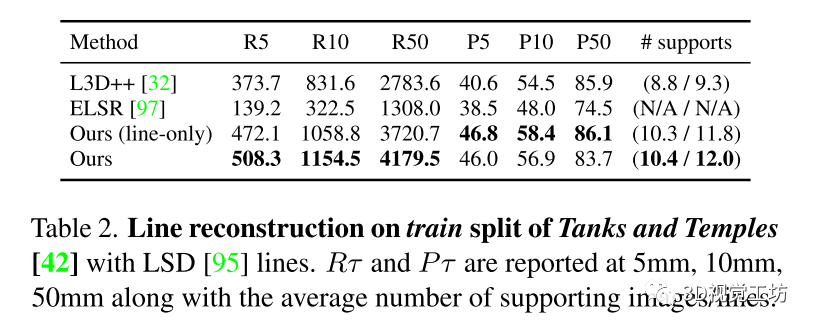
Ϋχ“Μ≤ΫΤάΙάΝΥTanksΚΆTemples ΐΨίΦ·ΒΡtrain≤ΩΖ÷ΓΘ”…”ΎSOLD2 «’κΕ‘ “ΡΎΆΦœώΫχ––―ΒΝΖΒΡΘ§“ρ¥ΥΫω Ι”ΟLSDΓΘ”…”ΎΥυΧαΙ©ΒΡΒψ‘Τ±Μ«εάμΈΣΫωΉ®ΉΔ”Ύ÷ς“ΣΡΩ±ξΘ§“ρ¥ΥΦΤΥψΤδ±ΏΫγΩρΘ§ΫΪΤδά©’Ι1ΟΉΘ§≤Δ«“ΫωΤάΙάΗΟ«χ”ρΡΎΒΡœΏΓΘ’β―υΩ…“‘Ζά÷Ι¥μΈσΒΊ≥ΆΖΘ‘Εάκ÷ς≥ΓΨΑΒΡ’ΐ»ΖœΏΧθΓΘ
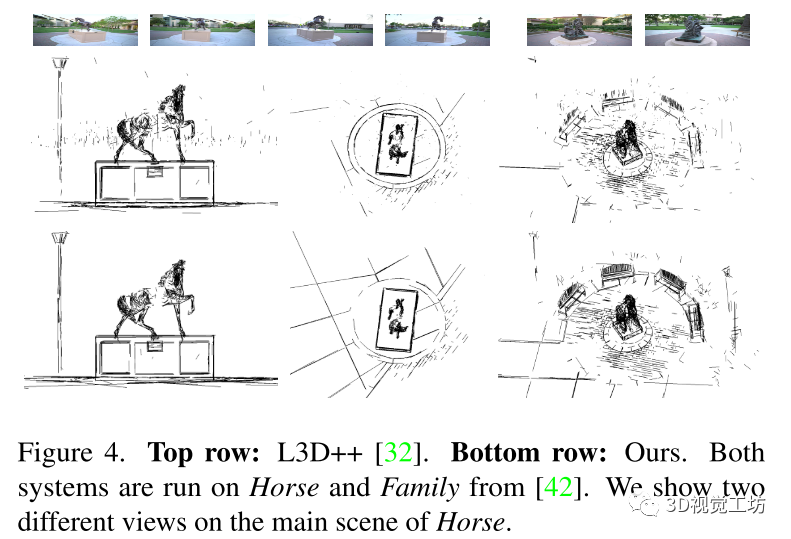
¬έΈΡΖΫΖ®ΧαΗΏΝΥΒΊΆΦ÷ ΝΩΓΘΆΦ4œ‘ ΨΝΥΤδΖΫΖ®ΚΆL3D++÷°ΦδΒΡΕ®–‘±»ΫœΓΘΫαΙϊœ‘ Ψ≥ωΗϋΚΟΒΡΆξ’ϊ–‘Θ§“≤ΨΏ”–Ηϋ…ΌΒΡύ–‘”ΒΡœΏΧθΘ§≤Δ Βœ÷ΝΥΕ‘œΗΈΔœΗΫΎ (άΐ»γ‘ΎΒΊΟφ…œ) ΒΡΗϋ«Ω¥σΒΡ÷ΊΫ®ΓΘ
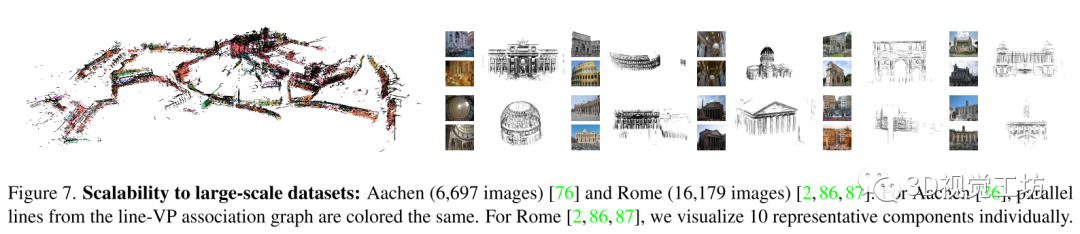
ΈΣΝΥ―ί ΨΥυΧα≥ωΒΡœΒΆ≥ΒΡΩ……λΥθ–‘Θ§ΜΙ‘ΎΝΫΗω¥σΙφΡΘ ΐΨίΦ·…œ‘Υ––ΤδΖΫΖ®: Aachen (6,697ΆΦœώ)ΚΆRome city (16,179ΆΦœώ) ΓΘΆΦ7œ‘ ΨΝΥΤδΖΫΖ®≤ζ…ζΨΏ”–«εΈζΫαΙΙΒΡΩ…ΩΩœΏΆΦΓΘ
ΈΣΝΥ÷ΛΟςΙΙΫ®ΒΡœΏΆΦΕ‘ΤδΥϊ”Π”Ο”––ßΙϊΘ§±»»γ ”ΨθΕ®ΈΜΚΆ‘≠±ΨΒΡΒψ‘ΤΡΘ–ΆΒΡœΗΜ·Β»ΖΫΟφΘ§Ϋχ––ΝΥ“Μ–© Β―ιΘΚ
’κΕ‘œΏΗ®÷ζΒΡ ”ΨθΕ®ΈΜΘΚ‘ΎΜώ»ΓΒΡ3DœΏΆΦ÷°…œΙΙΫ®ΝΥ“ΜΗωΜλΚœ ”ΨθΕ®ΈΜΘ§ΤδΒψΚΆœΏΕΦΨΏ”–ΓΘΨΏΧεά¥ΥΒΘ§ Ήœ» Ι”ΟΧα≥ωΒΡΖΫΖ®ΙΙΫ®HLoc ÷–ΒΡΒψΆΦΚΆœΏΆΦΓΘ»ΜΚσΖ÷±πΤΞ≈δΒψΚΆœΏ¥”3DΒΊΆΦ÷–ΒΡΙλΦΘ–≈œΔΜώ»Γ2D-3DΕ‘”ΠΙΊœΒΓΘ
Φχ”Ύ’β–©Ε‘”ΠΙΊœΒΘ§ΫΪΥΡΗωΉν–Γ«σΫβΤς : P3PΘ§P2P1LLΘ§P1P2LLΘ§P3LLΫαΚœ‘Ύ“ΜΗωΨΏ”–Ψ÷≤Ω”≈Μ·ΒΡΜλΚœRANSACΩρΦή÷–“‘ΜώΒΟΉν÷’ΒΡ6Ή‘”…Ε»ΉΥ ΤΓΘ
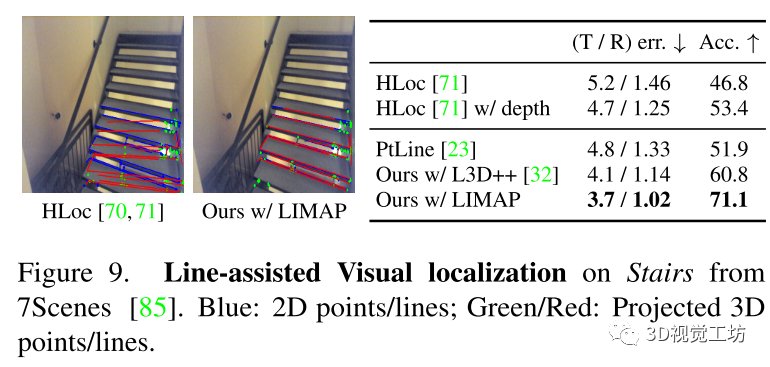
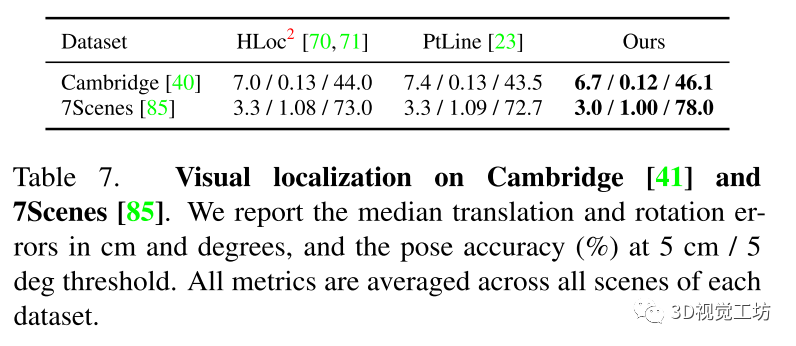
ΫαΙϊ‘Ύ±μ7Θ§÷ΛΟςΝΥœΏΗ®÷ζΒΡΕ®ΈΜ‘Ύ “ΡΎΚΆ “ΆβΨυ±»ΒΞΕάΒΡΜυœΏΜώΒΟΝΥΗϋΚΟΒΡΫαΙϊΘ§¥”Εχ―ι÷ΛΝΥ≤…”Ο3DœΏΆΦΫχ–– ”ΨθΕ®ΈΜΒΡ”––ß–‘ΓΘ
‘ΎΆΦ9÷–Θ§œ‘ ΨΝΥά¥Ή‘7 ScenesΒΡ¬ΞΧί≥ΓΨΑΒΡΗϋœξœΗΒΡΫαΙϊΘ§“ρΈΣΥϋ «ΉνΨΏΧτ’Ϋ–‘ΒΡ≥ΓΨΑ÷°“ΜΓΘœΏœ‘÷χΒΊ”–άϊ”Ύ÷Ί–¬ΆΕ”ΑΫαΙΙΒΡΕ‘ΉΦΘ§¥”46.8ΧαΗΏΒΫ71.1ΒΡΉΥΧ§ΨΪΕ»ΓΘ
œΗΜ·SFMΒψ‘ΤΘΚΆ®Ιΐ¥”¥σ÷¬’ΐ»ΖΒΡΜυ”ΎΒψΒΡSFM (άΐ»γCOLMAP) ΙΙΫ®ΒΡ3DœΏΆΦΘ§Ω…“‘ Ι”Ο3DœΏΦΑΤδΙλΦΘ–≈œΔΘ§Ά®ΙΐΒψ”κœΏΒΡΝΣΚœ”≈Μ·ά¥”≈Μ· δ»κΒΡœύΜζΉΥ ΤΓΘΈΣΝΥ―ι÷Λ’β“ΜΒψΘ§‘ΎHypersimΒΡ«ΑΑΥΗω≥ΓΨΑ…œ‘Υ––COLMAPΘ§‘ΎΤδ÷°ΚσΙΙΫ®œΏΒΊΆΦΘ§≤Δ÷¥––ΝΣΚœBA“‘”≈Μ·ΉΥΧ§ΚΆΡΎ≤ΈΓΘ
±ΨΈΡΖ÷œμΉ‘ 3D ”ΨθΙΛΖΜ ΈΔ–≈ΙΪ÷ΎΚ≈Θ§«ΑΆυ≤ιΩ¥
»γ”–«÷»®Θ§«κΝΣœΒ cloudcommunity@tencent.com …Ψ≥ΐΓΘ
±ΨΈΡ≤Έ”κ?ΧΎ―Ε‘ΤΉ‘ΟΫΧεΖ÷œμΦΤΜ°? Θ§ΜΕ”≠»»Α°–¥ΉςΒΡΡψ“ΜΤπ≤Έ”κΘΓ