WIFI&А¶СА(ESP32)ЧӘCANЧЬПЯ&ҙ®ҝЪTTLДЈҝй-A2-А¶САәНCANЧЬПЯНёҙ«НЁРЕ(ҫӯөдА¶САЦч»ъ)
ОДХВ/ҙр°ё/јјКхҙуЕЈ
·ўІј
WIFI&А¶СА(ESP32)ЧӘCANЧЬПЯ&ҙ®ҝЪTTLДЈҝй-A2-А¶САәНCANЧЬПЯНёҙ«НЁРЕ(ҫӯөдА¶САЦч»ъ)

Со·оОд
·ўІјУЪ 2023-10-15 18:00:44
·ўІјУЪ 2023-10-15 18:00:44
КөПЦөД№ҰДЬЛөГч
ЙиұёЧчОӘҫӯөдА¶САЦч»ъ, И»әуБ¬ҪУА¶САГыЧЦОӘ?ESP32_SLAVE_BT өДҙУ»ъЙиұё;
ЙиұёБ¬ҪУЙПҙУ»ъА¶САЦ®әу, °СА¶САҪУКХөҪКэҫЭНЁ№эCANЧЬПЯКдіц;
ЙиұёҙУCANЧЬПЯҪУКХөДКэҫЭНЁ№эА¶СА·ўЛНёшА¶САҙУ»ъ;

ІвКФ
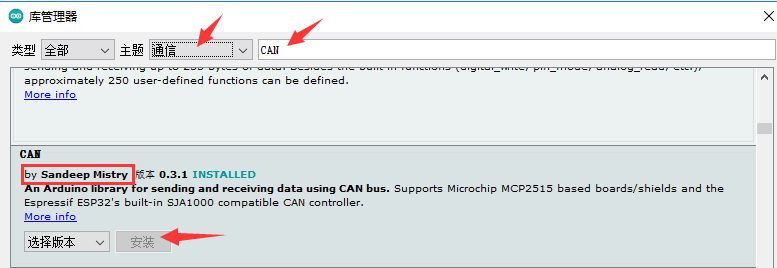
1,°ІЧ°CANЦ§іЦҝв(Из№ыТСҫӯ°ІЧ°БЛІ»РиТӘ°ІЧ°)
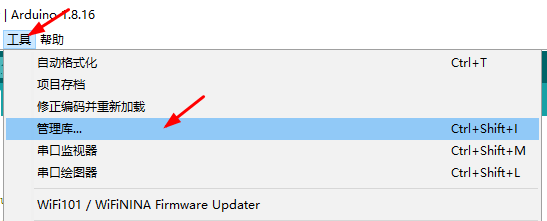
ЦчМвСЎФсНЁРЕ,И»әуКдИл CAN, НщПВХТөҪ¶ФУҰөДҝв,И»әуөг»ч°ІЧ°
2,ҙтҝӘХвҪЪөД№ӨіМ(·ЕөҪ·ЗЦРОДДҝВјҙтҝӘ)
АпГжУРБҪёц№ӨіМ?BT_CAN_MASTER Хвёц№ӨіМКЗФЫХвҪЪөД№ӨіМ
ТтОӘКЦН·Г»УРПЦіЙөДА¶САҙУ»ъЙиұёЛщТФҫНЧјұёБЛБнТ»ёцЙиұё, ЙХВјЙП BT_CAN_SLAVE №ӨіМЧчОӘДЈДвТ»МЁА¶САҙУ»ъЙиұё

3,МбКҫ,Из№ыУГ»§УРА¶САЙиұё,ҝЙТФЦұҪУПВФШХвҪЪөД№ӨіМБ¬ҪУЧФјәөДЙиұёҪшРРІвКФ, ФЪПВГжРЮёДОӘЧФјәөДЙиұёөДА¶САГыЧЦ.

4,ОТХвұЯҫНУГБҪёцЙиұёҪшРРПВФШІвКФСЭКҫ



5, ОТХвұЯөДЧчОӘДЈДвҙУ»ъЙиұёөДіМРтКЗХвСщЧУРҙөД

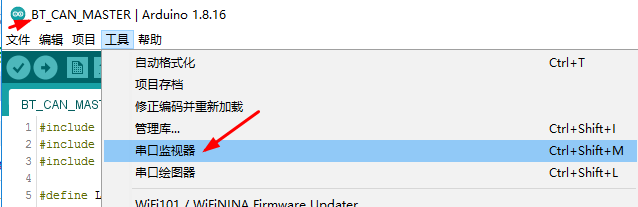
5,ПВФШНкіМРтТФәуҙтҝӘұҫҪЪ№ӨіМөДҙ®ҝЪјаКУЖч

А¶САҪУКХөДКэҫЭТІ»бЧӘ·ўөҪБЛCANЧЬПЯЙП

5,К№УГCANІвКФТЗ·ўЛНКэҫЭёшЙиұё,ДЈДвЙиұёҪУКХөҪCANКэҫЭ
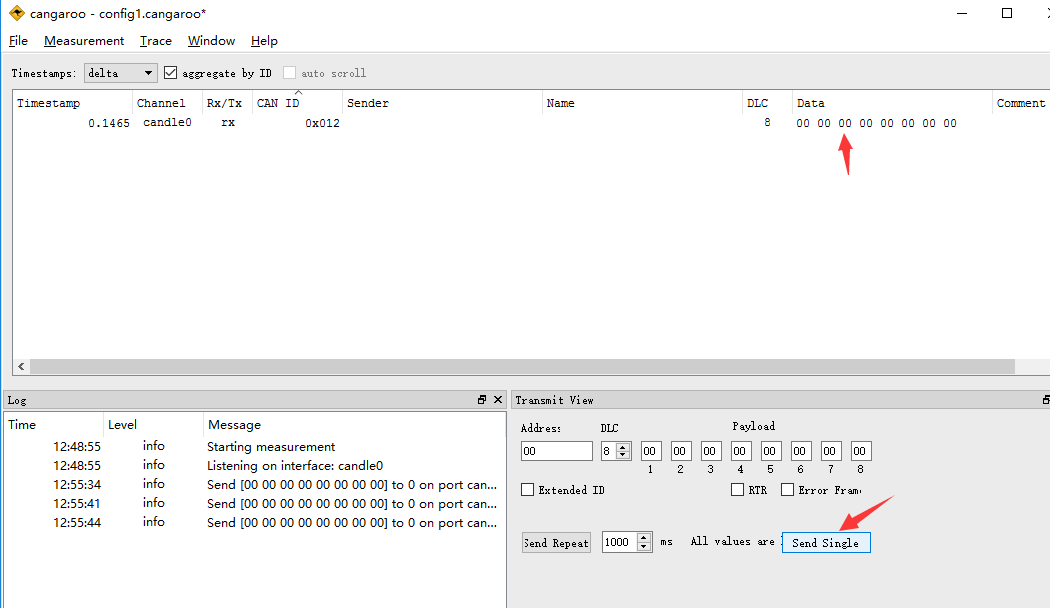
өг»ч·ўЛНТФәу»б·ўПЦҪУЧЕ»бКХөҪКэҫЭ;
КөјКЙПКЗЙиұёҪУКХөҪCANКэҫЭТФәу,НЁ№эА¶СА·ўЛНёшБЛА¶САҙУ»ъЙиұё
УЙУЪОТЙПГжЧцөДДЈДвөДА¶САҙУ»ъЙиұёҪУКХөҪКэҫЭТФәу»бЦұҪУ·ө»ШҪУКХөДКэҫЭ,? Йиұё°СҪУКХөҪөДА¶САКэҫЭНЁ№эCANКдіц.
іМРтЛөГч(Ц»ЛөПВХвҪЪөДіМРт)
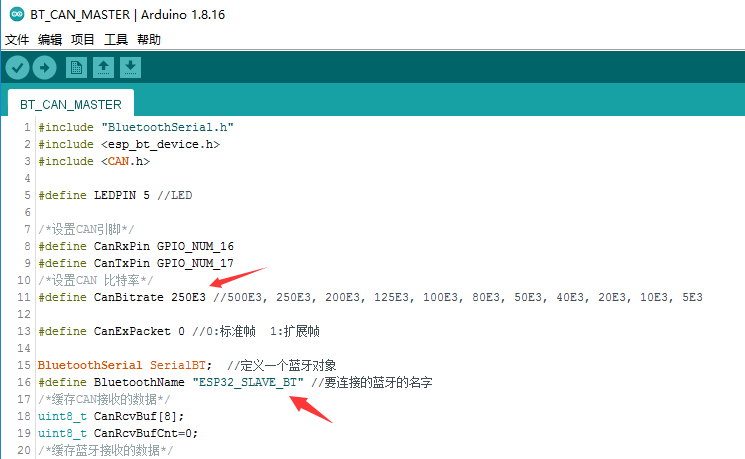
#include "BluetoothSerial.h"
#include <esp_bt_device.h>
#include <CAN.h>
#define LEDPIN 5 //LED
/*ЙиЦГCANТэҪЕ*/
#define CanRxPin GPIO_NUM_16
#define CanTxPin GPIO_NUM_17
/*ЙиЦГCAN ұИМШВК*/
#define CanBitrate 250E3 //500E3, 250E3, 200E3, 125E3, 100E3, 80E3, 50E3, 40E3, 20E3, 10E3, 5E3
#define CanExPacket 0 //0:ұкЧјЦЎ 1:А©Х№ЦЎ
BluetoothSerial SerialBT; //¶ЁТеТ»ёцА¶СА¶ФПу
#define BluetoothName "ESP32_SLAVE_BT" //ТӘБ¬ҪУөДА¶САөДГыЧЦ
/*»әҙжCANҪУКХөДКэҫЭ*/
uint8_t CanRcvBuf[8];
uint8_t CanRcvBufCnt=0;
/*»әҙжА¶САҪУКХөДКэҫЭ*/
uint8_t BtRcvBuf[100];
uint8_t BtRcvBufCnt=0;
uint8_t BtConnectedFlag=0;//А¶САБ¬ҪУЧҙМ¬
uint8_t BtConnectedFirst=0;//А¶САКЗ·сөЪТ»ҙОБ¬ҪУЙП
void setup() {
pinMode(LEDPIN, OUTPUT);
digitalWrite(LEDPIN, HIGH);
Serial.begin(9600);
/*BT*/
SerialBT.register_callback(Bluetooth_Event); //ЙиЦГКВјю»ШөчәҜКэ Б¬ҪУ ¶ПҝӘ ·ўЛН ҪУКХ
// SerialBT.onData(RecvData); //ЧўІбҪУКХ»ШөчәҜКэ
SerialBT.begin("ESP32_MASTER_BT",true); //ұҫ»ъА¶САөДГыЧЦ,ЙиОӘЦч»ъ
/*CAN*/
CAN.setPins(CanRxPin, CanTxPin);
if (!CAN.begin(CanBitrate*2)) {
Serial.println("Starting CAN failed!");
while (1);
}
CAN.onReceive(onReceive);//ЧўІбCANКэҫЭҪУКХ»ШөчәҜКэ
/*ИХЦҫҙтУЎ*/
Serial.println("start");
}
void loop()
{
/*Г»УРБ¬ҪУЙП№эА¶СА,Т»ЦұіўКФИҘБ¬ҪУ*/
if(BtConnectedFirst==0)
{
Serial.println("Connected .....");
BtConnectedFirst = SerialBT.connect(BluetoothName);
}
/*ёщҫЭА¶САБ¬ҪУЧҙМ¬ҝШЦЖЦёКҫөЖ*/
if(BtConnectedFlag)
{
digitalWrite(LEDPIN, LOW);
}
else
{
digitalWrite(LEDPIN, HIGH);
}
}
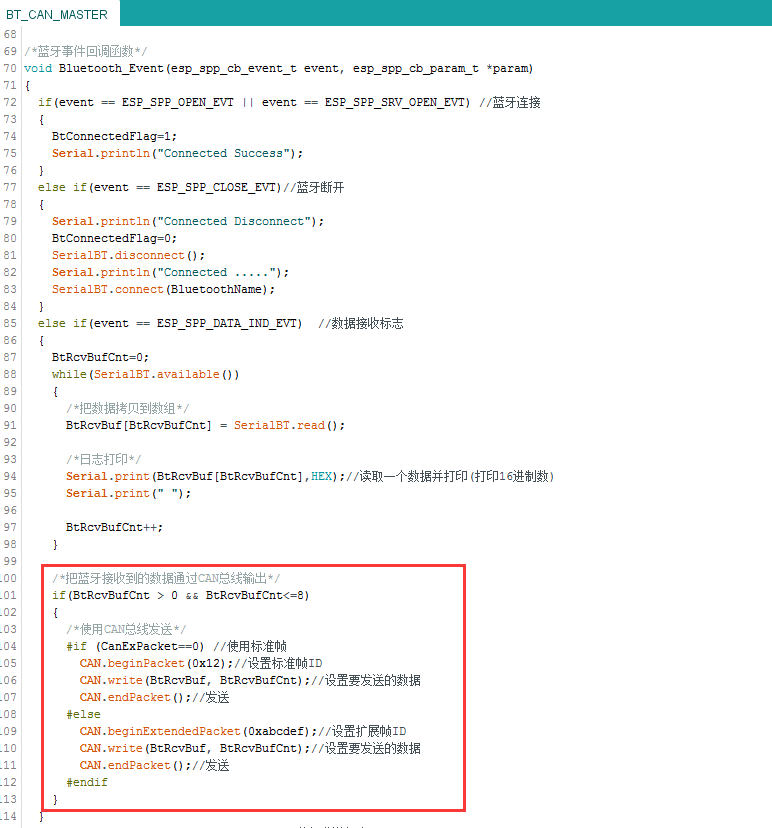
/*А¶САКВјю»ШөчәҜКэ*/
void Bluetooth_Event(esp_spp_cb_event_t event, esp_spp_cb_param_t *param)
{
if(event == ESP_SPP_OPEN_EVT || event == ESP_SPP_SRV_OPEN_EVT) //А¶САБ¬ҪУ
{
BtConnectedFlag=1;
Serial.println("Connected Success");
}
else if(event == ESP_SPP_CLOSE_EVT)//А¶СА¶ПҝӘ
{
Serial.println("Connected Disconnect");
BtConnectedFlag=0;
SerialBT.disconnect();
Serial.println("Connected .....");
SerialBT.connect(BluetoothName);
}
else if(event == ESP_SPP_DATA_IND_EVT) //КэҫЭҪУКХұкЦҫ
{
BtRcvBufCnt=0;
while(SerialBT.available())
{
/*°СКэҫЭҝҪұҙөҪКэЧй*/
BtRcvBuf[BtRcvBufCnt] = SerialBT.read();
/*ИХЦҫҙтУЎ*/
Serial.print(BtRcvBuf[BtRcvBufCnt],HEX);//¶БИЎТ»ёцКэҫЭІўҙтУЎ(ҙтУЎ16ҪшЦЖКэ)
Serial.print(" ");
BtRcvBufCnt++;
}
/*°СА¶САҪУКХөҪөДКэҫЭНЁ№эCANЧЬПЯКдіц*/
if(BtRcvBufCnt > 0 && BtRcvBufCnt<=8)
{
/*К№УГCANЧЬПЯ·ўЛН*/
#if (CanExPacket==0) //К№УГұкЧјЦЎ
CAN.beginPacket(0x12);//ЙиЦГұкЧјЦЎID
CAN.write(BtRcvBuf, BtRcvBufCnt);//ЙиЦГТӘ·ўЛНөДКэҫЭ
CAN.endPacket();//·ўЛН
#else
CAN.beginExtendedPacket(0xabcdef);//ЙиЦГА©Х№ЦЎID
CAN.write(BtRcvBuf, BtRcvBufCnt);//ЙиЦГТӘ·ўЛНөДКэҫЭ
CAN.endPacket();//·ўЛН
#endif
}
}
else if(event == ESP_SPP_WRITE_EVT)//КэҫЭ·ўЛНұкЦҫ
{
}
Serial.println();
}
/*CANКэҫЭҪУКХ»ШөчәҜКэ*/
void onReceive(int packetSize)
{
if (CAN.packetExtended())//ҪУКХөДКЗА©Х№ЦЎ
{
// Serial.println("extended");
}
if (CAN.packetRtr())//ЕР¶ПУРГ»УРRTR
{
// Serial.println("RTR");
}
/*»сИЎID*/
char id = CAN.packetId();
// Serial.print("packet id 0x");
// Serial.print(id, HEX);
// Serial.println();
if (CAN.packetRtr())//Ф¶іМЦЎГ»УРКэҫЭЦ»ҙтУЎКэҫЭіӨ¶И
{
// Serial.print("requested length:");
// Serial.print(CAN.packetDlc());//ҙтУЎDLC
// Serial.println();
}
else//ҙтУЎКэҫЭ
{
// Serial.print("data length:");
// Serial.print(packetSize);
// Serial.println();
// Serial.print("data:");
CanRcvBufCnt=0;
while (CAN.available())//Из№ыУРҝЙ¶БөДЧЦҪЪКэ
{
/*°СCanКэҫЭҝҪұҙөҪКэЧй*/
CanRcvBuf[CanRcvBufCnt] = CAN.read();
Serial.print(CanRcvBuf[CanRcvBufCnt],HEX);//¶БИЎТ»ёцКэҫЭІўҙтУЎ(ҙтУЎ16ҪшЦЖКэ)
Serial.print(" ");
CanRcvBufCnt++;
}
//°СҪУКХөДCAN КэҫЭНЁ№эА¶СА·ўЛНіцИҘ
if(SerialBT.connected())//А¶САҙҰУЪБ¬ҪУЦР
{
SerialBT.write((const uint8_t*)CanRcvBuf, packetSize);//·ўЛНКэҫЭ
}
}
Serial.println();
}
/*А¶САКэҫЭҪУКХ»ШөчәҜКэ*/
//void RecvData(const uint8_t *buffer, size_t size)
//{
// Serial.println("read");
//
// if(size > 0 && size<=8)
// {
// /*К№УГCANЧЬПЯ·ўЛН*/
// #if (CanExPacket==0) //К№УГұкЧјЦЎ
// CAN.beginPacket(0x12);//ЙиЦГұкЧјЦЎID
// CAN.write(buffer, size);//ЙиЦГТӘ·ўЛНөДКэҫЭ
// CAN.endPacket();//·ўЛН
// #else
// CAN.beginExtendedPacket(0xabcdef);//ЙиЦГА©Х№ЦЎID
// CAN.write(buffer, size);//ЙиЦГТӘ·ўЛНөДКэҫЭ
// CAN.endPacket();//·ўЛН
// #endif
// }
//}
//SerialBT.println("..");1,CANЛЩВКЕдЦГ, ТӘБ¬ҪУөДА¶САөДГыЧЦ
2,А¶САҪУКХөДКэҫЭНЁ№эCANЧЬПЯКдіц
3,CANЧЬПЯҪУКХөДКэҫЭНЁ№эА¶СА·ўЛН

ұҫОДІОУл?МЪС¶ФЖЧФГҪМе·ЦПнјЖ»®Ј¬·ЦПнЧФЧчХЯёцИЛХҫөг/І©ҝНЎЈ
ФӯКј·ўұнЈә2023-07-28Ј¬ИзУРЗЦИЁЗлБӘПө cloudcommunity@tencent.com Йҫіэ
ұҫОД·ЦПнЧФ ЧчХЯёцИЛХҫөг/І©ҝН?З°НщІйҝҙ
ИзУРЗЦИЁЈ¬ЗлБӘПө cloudcommunity@tencent.com ЙҫіэЎЈ
ұҫОДІОУл?МЪС¶ФЖЧФГҪМе·ЦПнјЖ»®? Ј¬»¶УӯИИ°®РҙЧчөДДгТ»ЖрІОУлЈЎ
ЖАВЫ
өЗВјәуІОУлЖАВЫ
НЖјцФД¶Б
ДҝВј