PWM输入输出

PWM(Pulse Width Modulation)即脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行制,来等效地获得所需要的模拟参量,常应用于电机控速、开关电源等领域。
PWM参数
PWM 中有三个重要参数:频率、占空比(高电平时长占整个周期信号时长的比例)、分辨率(占空比可调精度)。
下图为PWM模式1时的波形图:

输出PWM波的原理是,利用TIM定时器和输出比较,TIM定时器会周期性地线性增长,当计数器的值低于设定的比较值时输出高电平,大于等于比较值时输出低电平。由于是线性增长,高电平时长占整个周期信号时长的比例是固定的,这个比例被称为“占空比”,英文“Duty Cycle”。
在嵌入式系统中,特别是使用定时器来生成PWM信号时,经常使用的是定时器的比较寄存器(Capture/Compare Register,CCR)和自动重载寄存器(Auto-Reload Register,ARR)来控制PWM的占空比。
给定:
- CCR:比较寄存器的值(通常用来设置PWM波形的占空比)
- ARR:自动重载寄存器的值(通常用来设置PWM波形的周期)
那么:Duty=CCR/(ARR+1)
为什么是ARR+1,而不是ARR?
计数范围实际上是从0到ARR,共计ARR+1个计数值。
假设ARR的值为99,CCR的值为50。
小于CCR的数字有0-49共50个,计数范围为0-99共100个,占空比应为50%。
即CCR/(ARR+1)
通过调节CRR,可以修改PWM的占空比。ARR不同,对占空比的调节精度也不同。CCR值加一,那么占空比将提高1/(ARR+1),ARR越大,可以实现的最小步进越小,分辨率越高,对占空比的调节越精细。
PWM的分辨率(Resolution)只与ARR有关:Reso=1/(ARR+1)
最后一个参数是PWM的频率,也就是计数器从0到ARR的变化频率。
定时器时钟频率就是计数器的计数频率,每个周期,计数器值+1。需要从0加到ARR,共ARR+1个时钟周期。
也就是:PWM周期时长=定时器时钟周期时长*(ARR+1)
周期时长取倒数就是频率:PWM频率=定时器频率/(ARR+1)
定时器频率可以通过时钟源频率除以分频因子获得。
给定:
- CK_PSC:计数单元时钟源频率
- PSC:分频因子
那么:Freq=CK_PSC/(PSC+1)/(ARR+1)
输出PWM
接下来将以SG90舵机、直流电机、LED灯为例,输出PWM。包括如何查阅文档,进行引脚选取。
事件和中断

上图下方有“事件”和“中断和DMA输出”
- 若产生的是更新中断,则该信号会通往配置好的 NVIC 定时器通道,此时 CPU 将会响应定时器的更新中断。
- 若产生的是更新事件,更新事件不会触发中断,但可以触发内部其他电路的工作。
LED呼吸灯
查询LED灯的引脚,位于哪个定时器的哪个通道。
通过原理图,可以看出LED1对应PA8引脚。但无法通过原理图获取具体位于哪一个通道。

通过查询引脚定义,可以看到,PA8还是TIM1高级定时器的CH1通道。

使能TIM1时钟
我们需要先查询TIM1时钟挂载的位置。这可以在库函数定义中查看。
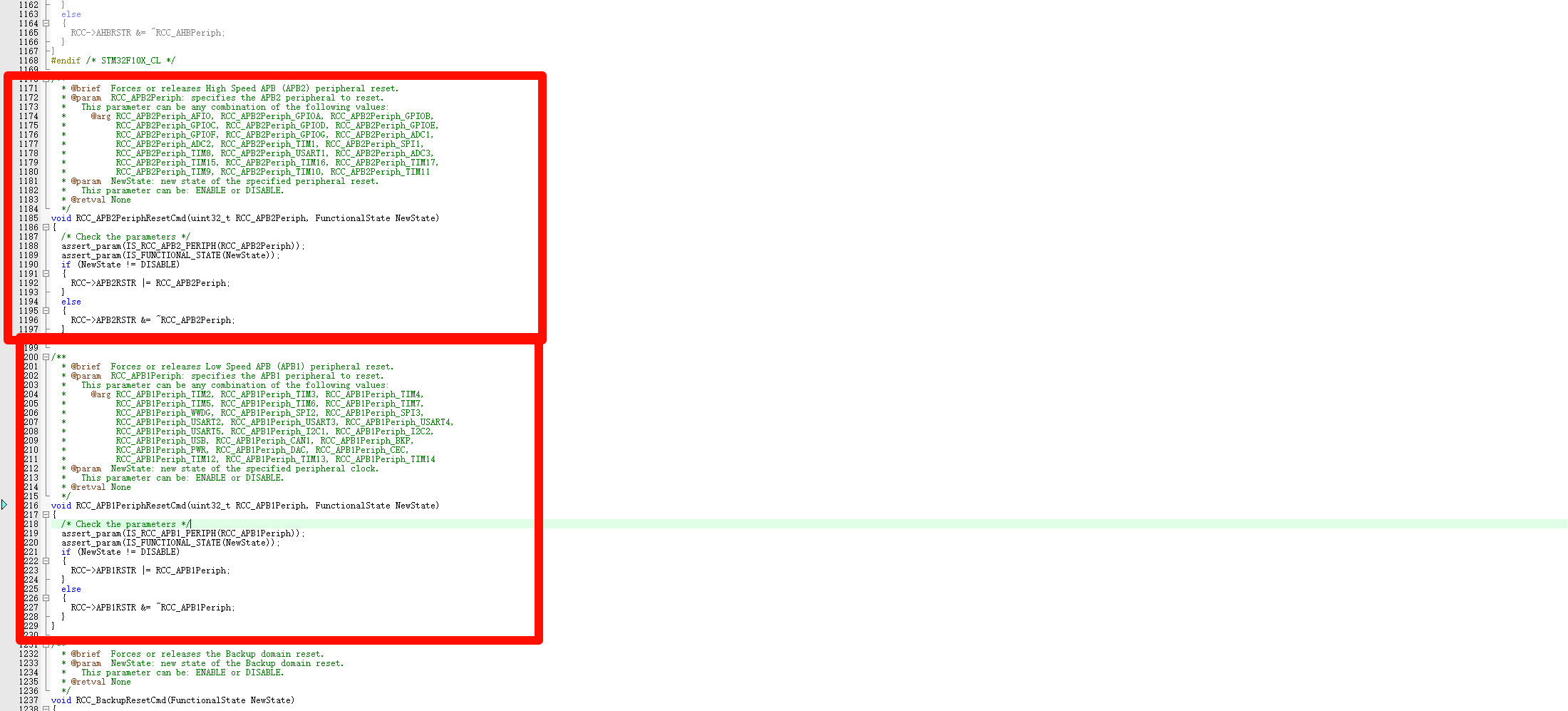
TIM1出现在RCC_APB2PeriphClockCmd()的参数列表中,这个函数的作用是:控制STM32微控制器中连接到APB2总线上的特定外设的时钟使能或禁用。
RCC:代表Reset and Clock Control(复位和时钟控制),是STM32系列微控制器中负责控制时钟的模块。APB2:代表Advanced Peripheral Bus 2(高级外设总线2),是STM32中的一种外设总线,用于连接某些外设到核心。Periph:是Peripheral(外设)的缩写,指的是连接到APB2总线的外设。ClockCmd:是Clock Command(时钟命令)的缩写,指的是该函数用于控制外设时钟的使能或禁用。
同样挂载在APB2总线上的还有GPIOA,可以通过或运算,一行代码使能:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1|RCC_APB2Periph_GPIOA,ENABLE);GPIO初始化
PA8口目前是TIM1通道,需要将Mode设置为复用推挽输出。
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);定时器初始化
这一步将内部时钟作为时钟源。在stm32f10x_tim.h中找到相关函数。

通过调用TIM_InternalClockConfig函数,可以将定时器配置为使用内部时钟源。
TIM_InternalClockConfig(TIM1);配置完时钟源之后,需要配置时基单元。
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 -1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 -1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStructure);- TIM_ClockDivision:设置为一分频
- TIM_CounterMode:选择常用的向上计数模式
- TIM_Period:目标计数值,达到该数值后会重置为TIM_RepetitionCounter设定的值。
- TIM_Prescaler:设置为720分频,时钟源发生720个上升沿信号后才计数一次。
- TIM_RepetitionCounter:达到目标计数值后,寄存器值自动重装为0
配置OC输出比较
每个定时器都有多个通道,在初始化时需要指明通道、定时器。 其中:
- 定时器通过函数参数指定
- 通道通过函数名指定
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OC1Init(TIM1,&TIM_OCInitStructure);TIM_OCInitTypeDef结构体有很多配置项,上面的代码只配置了一部分,剩下的部可以通过TIM_OCStructInit(&TIM_OCInitStructure);进行初始化。这个函数的内容就是为结构体的每一项赋初始值,因为要修改数据,所以参数传递方式为地址传参。
输出比较模式设置为TIM_OCMode_PWM1。这是向上比较模式,也就是本文开头的举例,>=CCR时为低电平。

更多的TIM_OCMode可以在stm32f10x_tim.h中查找。
TIM_OCPolarity的作用是配置信号的极性:
TIM_OCPolarity_High:极性不翻转TIM_OCPolarity_Low:极性翻转
尽管TIM_OCMode_PWM1已经指定了PWM1模式下的工作方式,但为了确保输出信号符合预期并满足外部设备的要求,仍然需要进一步配置输出比较通道的极性。
TIM_OutputState是配置输出使能,设置为TIM_OutputState_Enable才能正常输出。
TIM_Pulse的值就是CCR比较寄存器的值,设置为0,表示复位后为点亮状态,并且为100%亮度。
使能TIM定时器
上面的操作只是配置,没有启动。
TIM_Cmd(TIM1,ENABLE);
TIM_CtrlPWMOutputs(TIM1,ENABLE);TIM_Cmd(TIM1,ENABLE);的作用是使能TIM1定时器。
在高级定时器中,需要TIM_CtrlPWMOutputs()输出PWM波。
实现呼吸灯效果
需要明确:
TIM_TimeBaseInitTypeDef部分是配置时基模块,是时钟+计数TIM_OCInitTypeDef部分是配置输出比较模块,对计数进行处理
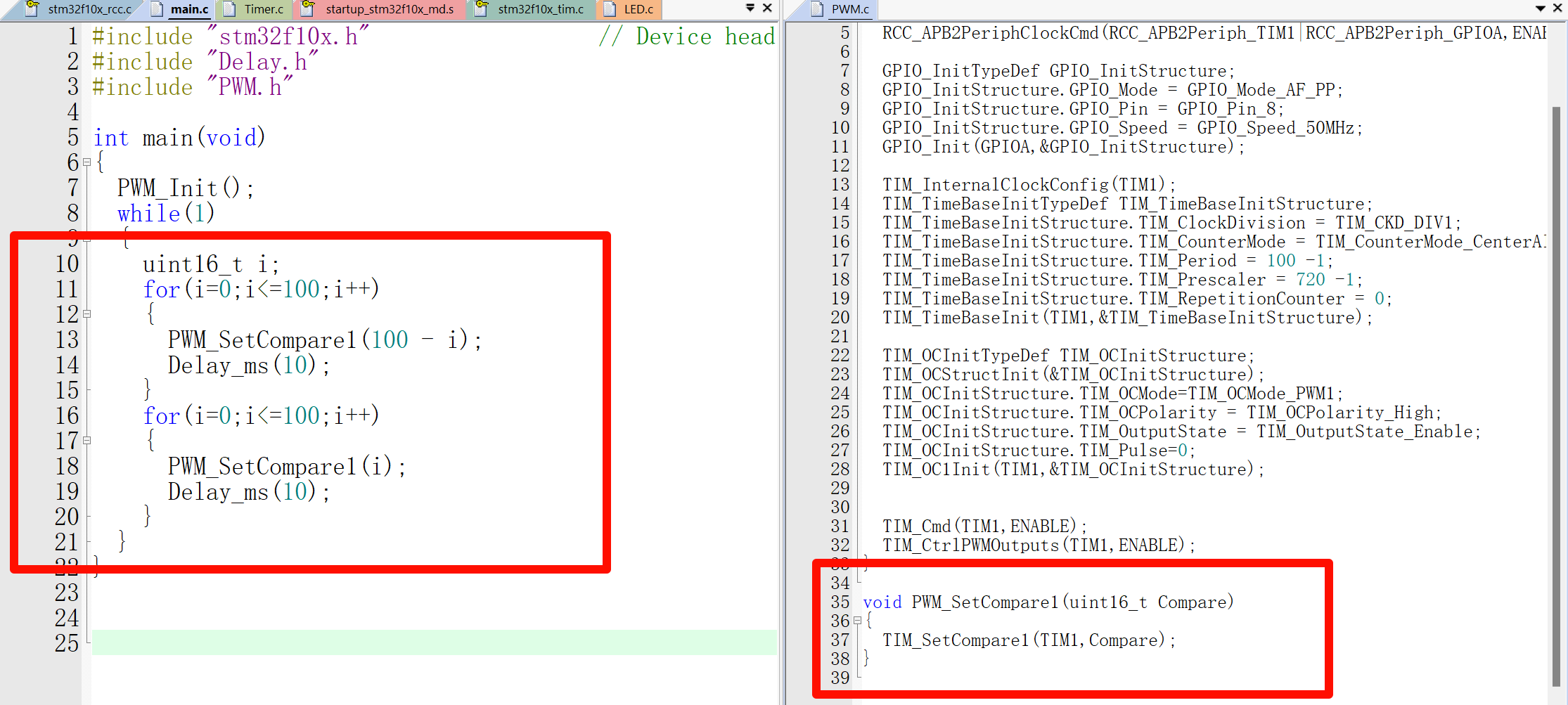
TIM_SetCompare1()的作用是修改定时器的通道1的CCR。
- 通道1在函数名中指定
- 定时器在函数参数中指定
- CCR的值在函数参数中指定
添加延迟是为了让呼吸效果更明显。
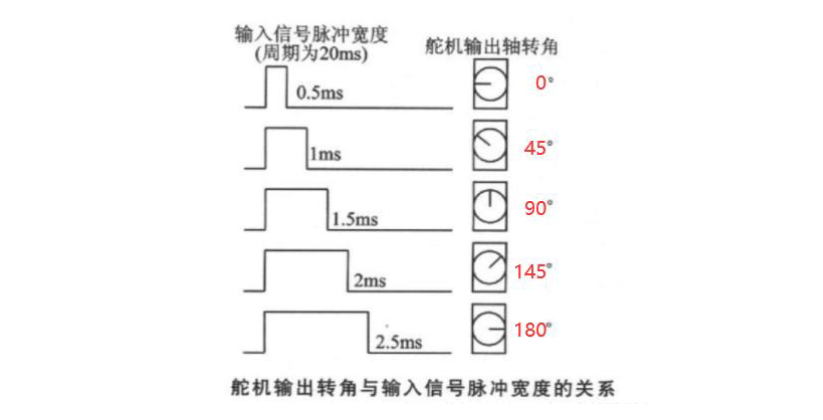
驱动SG90舵机
SG90 舵机的控制信号为周期是 20ms 的脉宽调制(PWM)信号,其中脉冲宽度从 0.5ms-2.5ms,相对应舵盘的位置为 0—180 度,呈线性变化。(180°舵机版本)。
也就是说,PWM波的周期为20ms。
定位舵机接口所在引脚
通过原理图,可以看到四个舵机的引脚为SERVO_x对应PB12-PB15。
同LED呼吸灯:无法通过原理图获取具体位于哪一个通道。
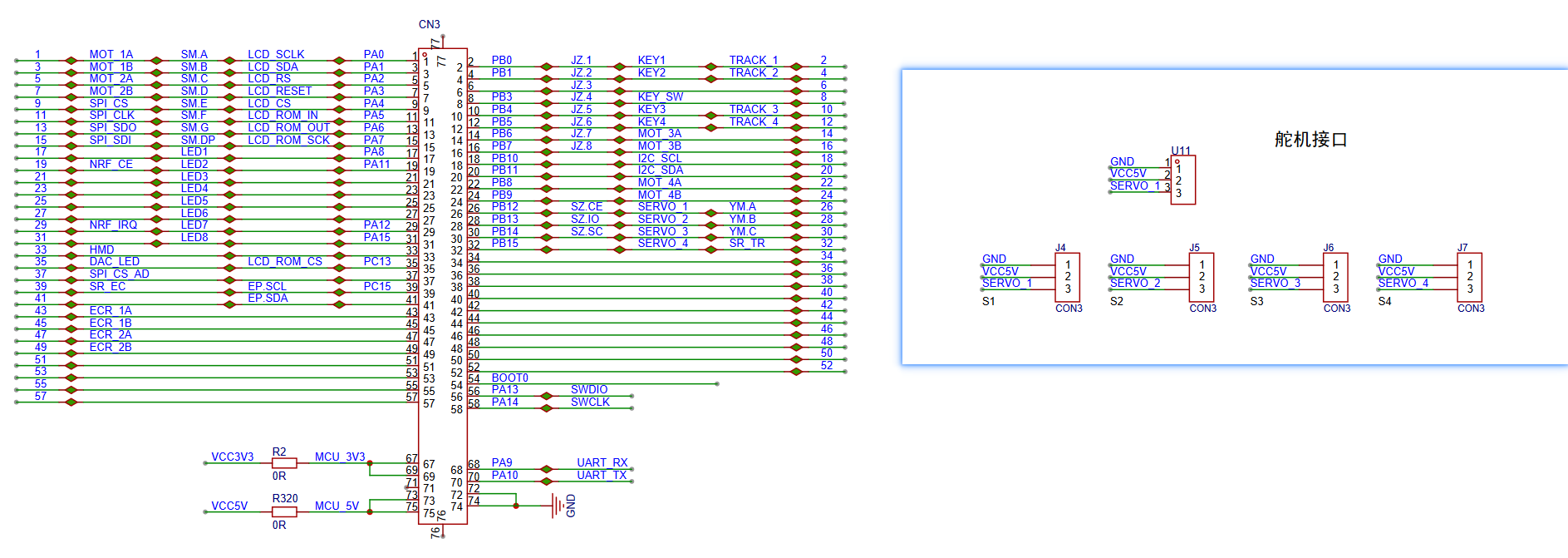
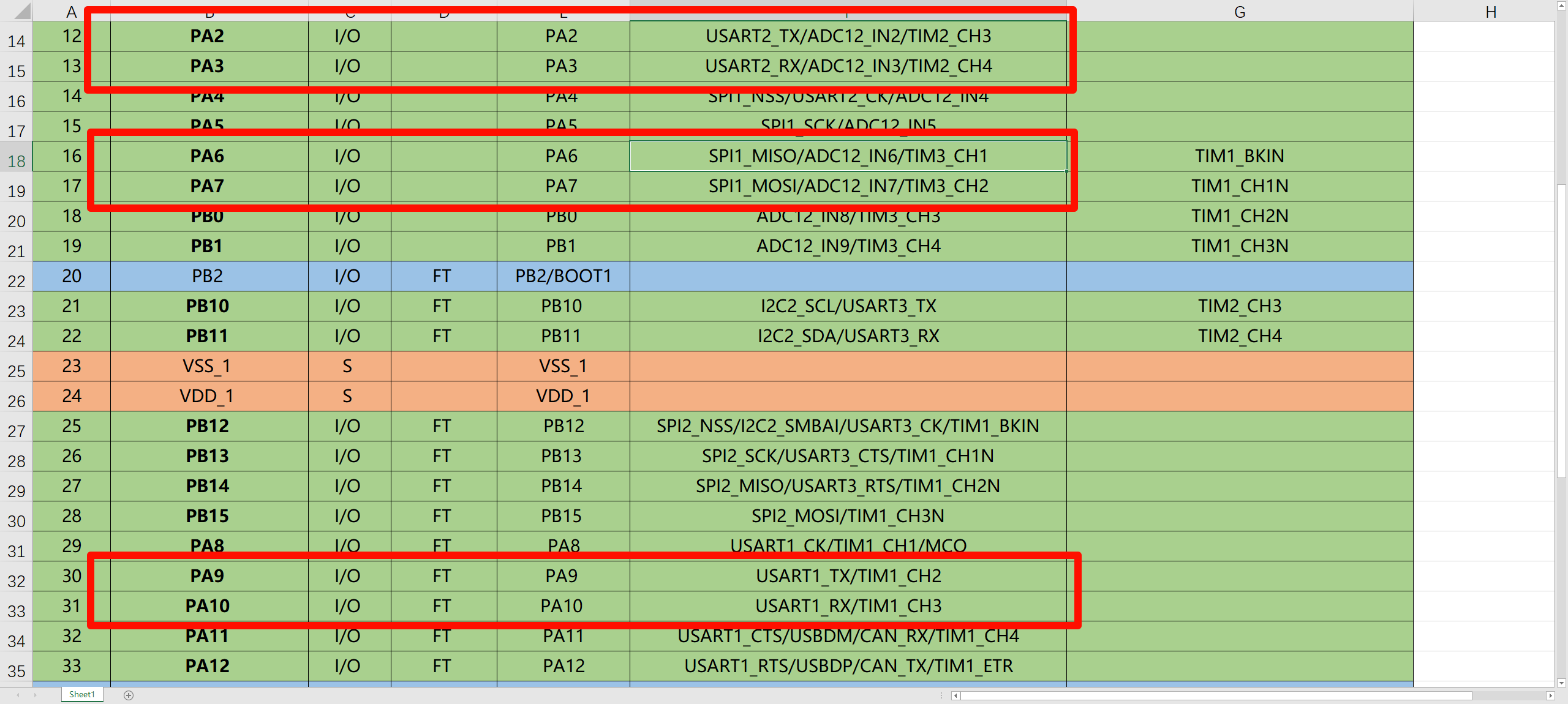
在引脚定义的表格中,可以查询默认的复用功能。

这四个引脚不同于“LED呼吸灯”中的PA8。
PA8是TIM1_CH1PB12是TIM1_BKIN:TIM1的备份输入(Break Input)PB13-15是TIM1_CHxN:TIM1的通道x的互补通道
在这里,我们仍用PA8输出PWM波,通过飞线,将PWM波输出到舵机的接口上。 这一部分的代码承接自LED部分,只需要修改:
- pwm波周期:修改为20ms
- CCR比较值:0.5/1/1.5/2.0/2.5
修改PWM波周期
TIM_TimeBaseInitStructure.TIM_Period = 2000 -1;
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 -1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_Prescaler预分频器值为720,系统时钟周期为72M,所以分频后频率为0.1MHz,周期10us。TIM_Period目标计数值为2000,需要2000个时钟周期,TIM的频率为0.1/2000MHz,周期20ms。
按键修改CCR
按键的使能相对简单,需要在原理图中找到按键对应的GPIO口。

在库函数定义中查找,GPIOB挂载在APB2上。

void Key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1|GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
}按键在按下时,GPIO读取为低电平,松开后应上拉到高电平。即采用GPIO_Mode_IPU上拉输入模式。
- 如果为下拉输入,那么按不按结果是一样的,读取都是低电平
- 如果为浮空输入,那么按下一次后,GPIO口始终读取为低电平,只有第一次是有效的。
uint8_t Key_GetNum(void)
{
uint8_t KeyNum = 0;
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0);
Delay_ms(20);
KeyNum = 1;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);
Delay_ms(20);
KeyNum = 2;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_4) == 0);
Delay_ms(20);
KeyNum = 3;
}
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_5) == 0)
{
Delay_ms(20);
while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_5) == 0);
Delay_ms(20);
KeyNum = 4;
}
return KeyNum;
}Delay_ms的作用是按键防抖,去除毛刺。
根据原理图接线
下图中,我插入的是J4位置,与26号引脚共线。
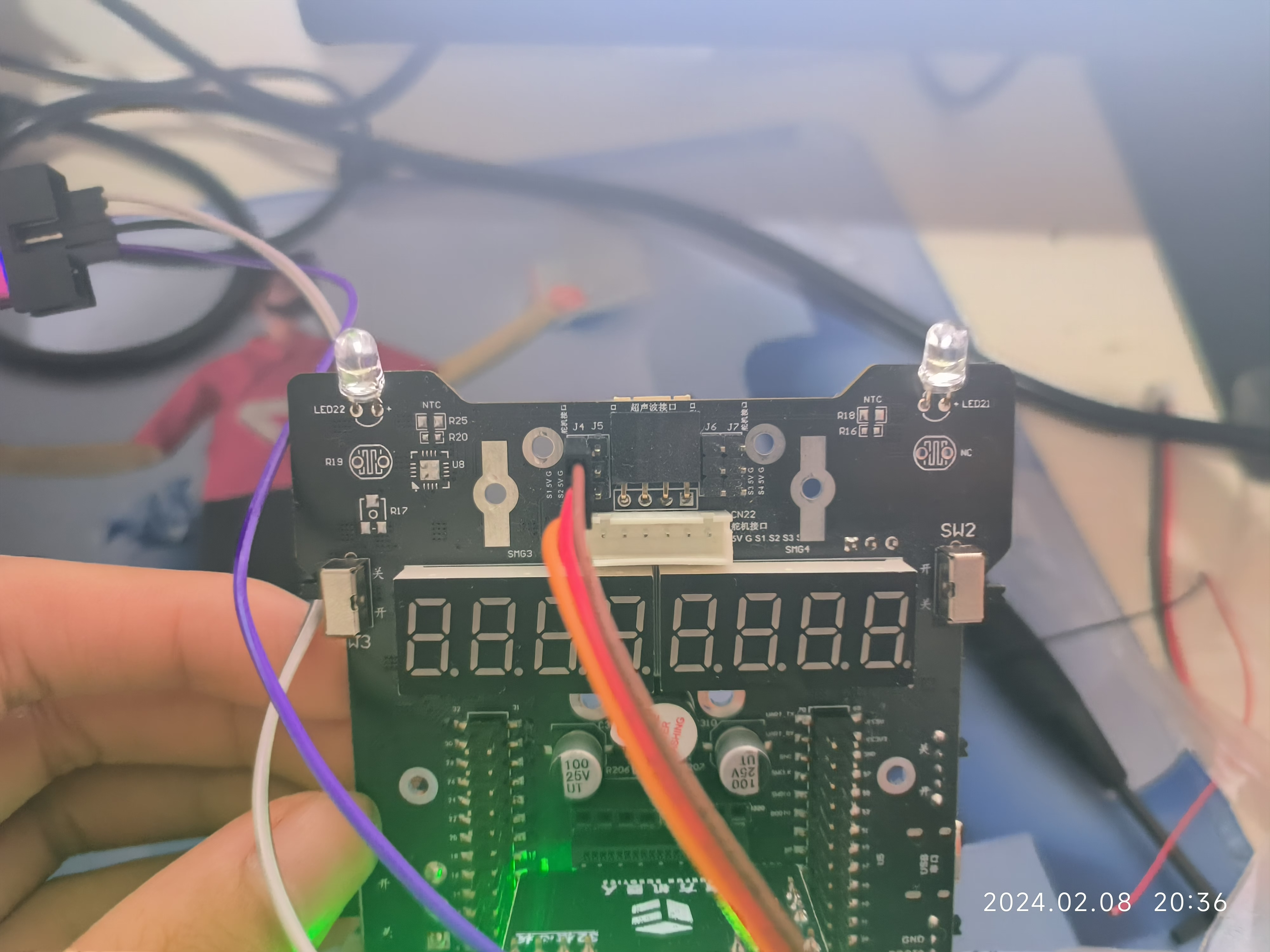
将26号引脚与PA8所在的17号引脚用杜邦线连接起来。
VID_20240208_204405
直流电机
不同于LED灯和舵机,直流电机属于大功率器件,需要额外的驱动,普通IO口驱动能力不足。
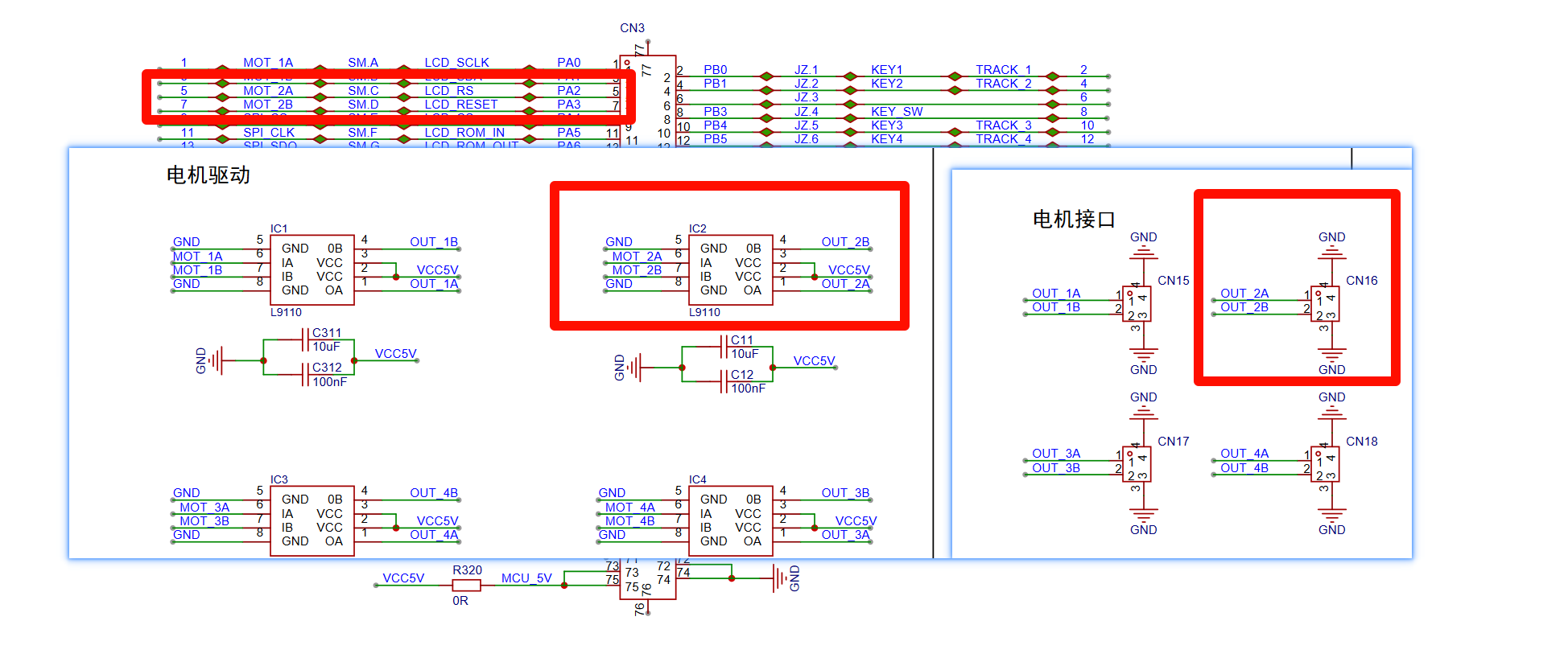
根据原理图,定位电机驱动的引脚位置
PA0复用作TIM2_CH1_ETR,目前尚未学习。因此本文选择PA2和PA3。对应的是TIM2_CH3和TIM2_CH4。
配置TIM2的RCC
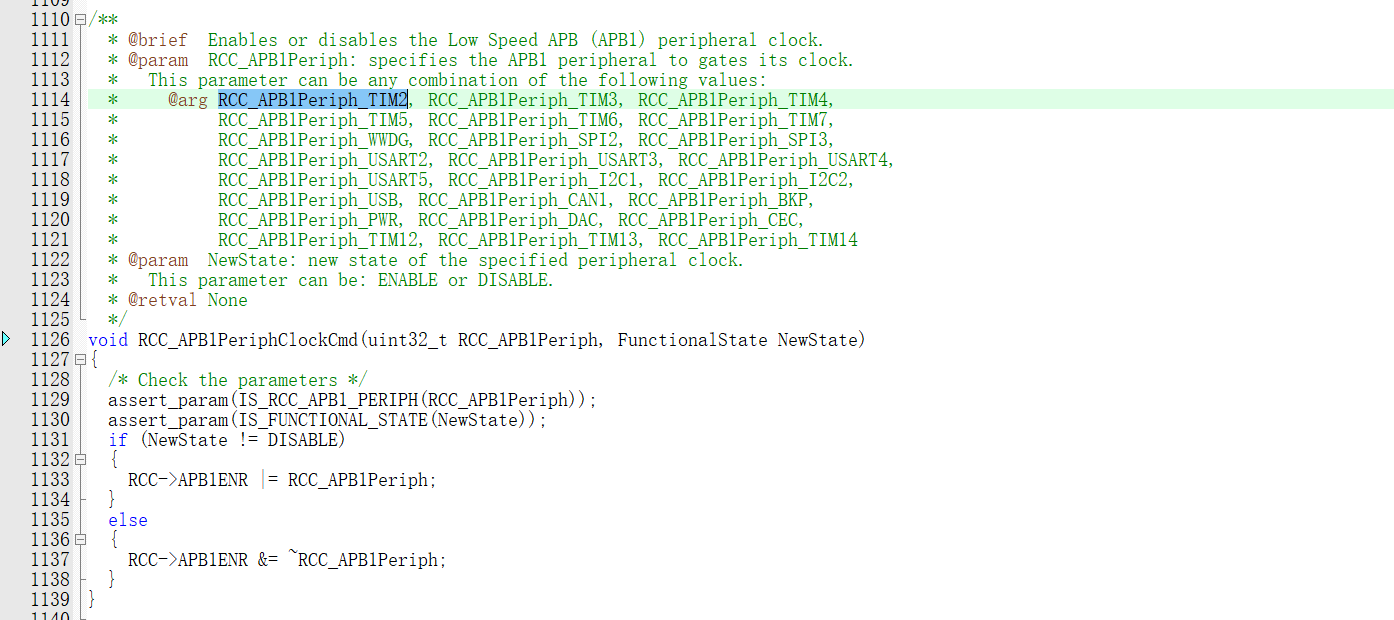
TIM2挂载在APB1下,挂载位置在前文有提到:可以通过库函数源文件的注释查看。
到这里,需要明确:
TIM_OCInitTypeDef是对输出比较通道的配置信息。TIM_OCxInit是将配置加载到具体的通道上。由于存在多个TIM定时器,每个定时器有多个通道。因此需要指明将配置文件加载到哪个定时器的哪个通道。定时器通过函数参数指定,通道通过函数名指定。
在前面的LED和舵机中,只需要在一个通道上输出PWM波:
- LED只有一个输入,另一端焊死在GND上,始终为低电平。
- SG90舵机也只有一个控制输入。
而在直流电机中,两个输入引脚在不同的高低电平下,状态是不一样的:
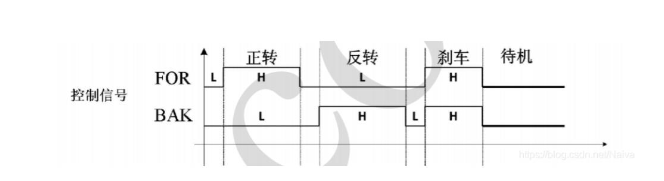
两个引脚都应输出PWM波,而非固定为低电平或高电平。 那么,需要做的就是把配置文件加载到TIM2定时器的CH3和CH4通道上。
TIM_OC3Init(TIM2,&TIM_OCInitStructure);
TIM_OC4Init(TIM2,&TIM_OCInitStructure);TIM2不是高级定时器,因此不需要TIM_CtrlPWMOutputs()。
利用OLED方便调试
这两个通道的TIM定时器是一样的,变化周期也是一样的。 两个通道的CCR都可以单独指定,实现分别调节两个引脚的电平,但变化周期是一致的。
输入捕获
输入捕获(Input Capture)又称 IC。 在输入捕获模式下,当通道输入引脚出现指定电平跳变时,当前CNT的值将被锁存到CCR中,可用于测量PWM波形的频率、占空比、脉冲间隔、电平持续时间等参数。每个高级定时器和通用定时器都拥有4个输入捕获通道,有两种用途:
- 配置为PWMI模式,同时测量频率和占空比
- 配合主从触发模式,实现硬件全自动测量
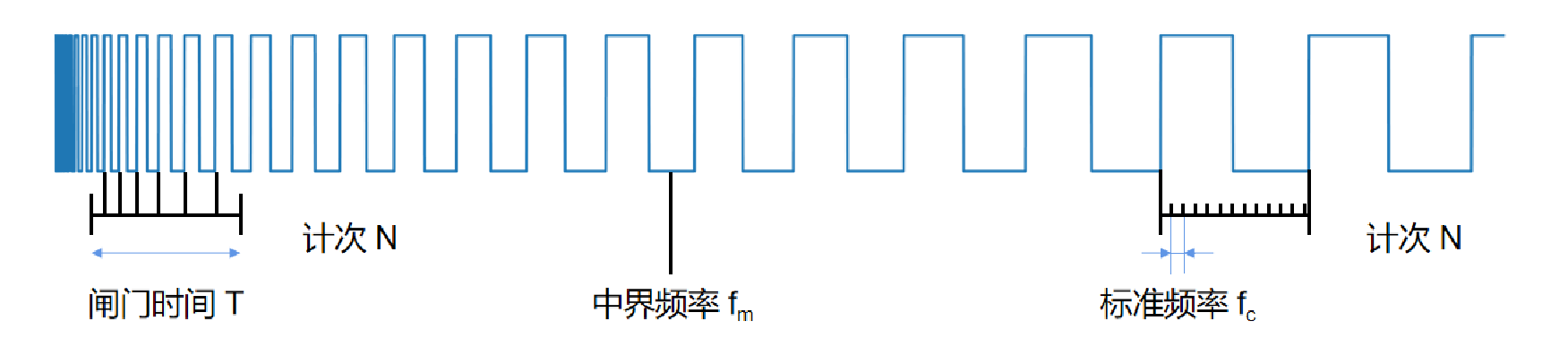
- 测频法:在闸门时间T内,统计上升沿次数N,频率
f=N/T - 测周法:在两个上升沿内,以标准频率fc计次,次数为N,频率
f=fc/N
以上两种测试结果都会存在一个固有误差,即“计次存在正负 1 误差”:
- 测频法,可能刚计入上升沿就结束计数,也可能结束时即将计入下一个上升沿。即结束时刻位于波形的一个周期内。
- 测周法,可能刚计入一次标准频率就结束计数,也可能结束计数时即将计入下一次标准频率。即结束时刻位于标准频率的一个周期内。
但是:
- 测频法适合测试高频信号。在闸门时间内,样本越多(上升沿数量),计次数量就越多则助于减小误差。
- 测周法适合测试低频信号。低频信号周期长,计次数多,误差越小。
- 测频法更新速度相较测周法慢,但数值相对稳定。测周法更新速度快,但数值跳变也快。
测频法适用于高频信号,测周法适用于低频信号。那高频信号以及低频信号的范围就会引发争议,即多少频率算高频,多少频率算低频。因此引出一个概念加“中界频率”。频率高于中界频率的信号属于高频信号,使用测频法测量误差更小;频率低于中界频率的信号属于低频信号,使用测周法测量误差更小。 中界频率:对某信号使用测频法和测周法测量频率,两者引起的误差相等,则该信号的频率定义为中界频率。
配置输入通道的RCC
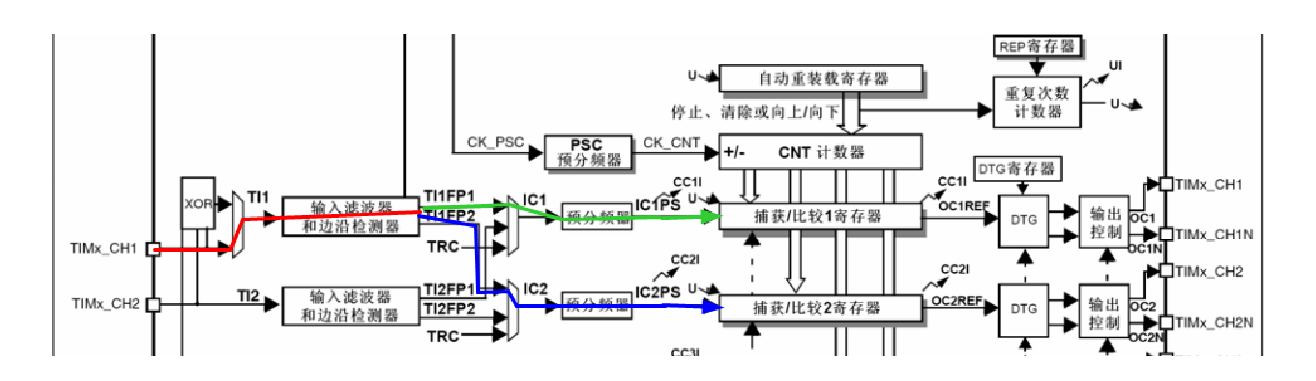
只需要选择一个CH通道,就可以同时测量PWM频率和占空比:在进入输入滤波器和边沿检测器后,触发后续电路,TI1FP1、TI1FP2两信号任选其一或均产生。
- CH1、CH2两通道可以交叉使用,CH3、CH4两通道可以交叉使用。
- CH1可以同时开TI1FP1、TI1FP2两个通道,同时测量信号频率,信号占空比。
这些通道都是可选的。 在上一步的直流电机中,我们已经使用了PA2和PA3和TIM2_CH3和TIM2_CH4。 现在我们可以选择TIM3作为输入捕获的定时器。由于CH1和CH2在输入时可以交叉使用,任选一条输入都可以分成两条通道。所以CH1和CH2的时基配置和IC配置是一致的,只是初始化的GPIO引脚位置不同。
初始化输入引脚
本文选择TIM3的CH1通道。
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);- GPIO_Mode:确保在没有外部输入时,引脚被拉高到逻辑高电平,从而防止引脚漂移或无效输入。也可以设置为下拉输入。
- GPIO_Pin:TIM3_CH1对应PA6,因此初始化的GPIO引脚为GPIO_Pin_6。
时钟源
设置内部时钟作为TIM3的时钟源。
TIM_InternalClockConfig(TIM3);配置时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=65536-1;
TIM_TimeBaseInitStructure.TIM_Period=72-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);这段代码对比上文中的PWM输出,好像没有什么区别。
TIM_Period和TIM_Period的配置原因将在后文解释,解释之前需要铺垫一些内容。
产生一个疑问:还是内部时钟的上升沿触发,TIM负责周期性地累加。是在统计内部时钟的次数,跟输入捕获有什么关系?
配置IC输入捕获
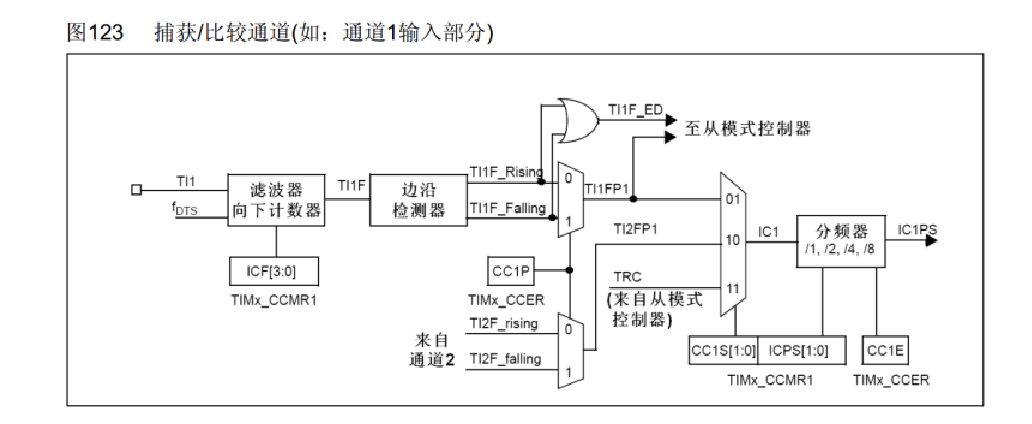
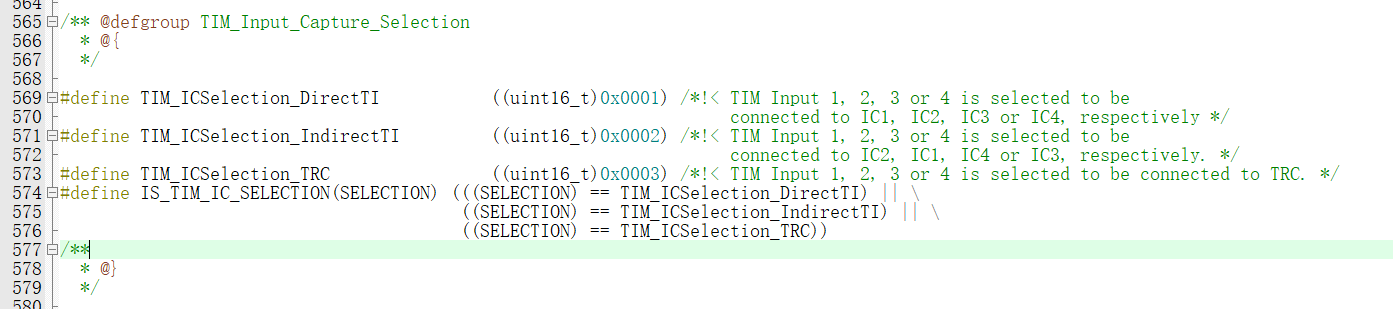
输入通道在图中给出了二进制表示,可以到库函数定义中查找:
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter=0;
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICPrescaler=TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICSelection=TIM_ICSelection_DirectTI;
TIM_ICInit(TIM3,&TIM_ICInitStructure);- TIM_Channel:输入捕获通道为TIM_Channel_1,也就是CH1。
- TIM_ICFilter:滤波器。当连续采集N+1个高电平时,视作高电平。不连续则延续上一个周期的电平。用于过滤毛刺。
- TIM_ICPolarity:边沿检测,设置为上升沿,下降沿也可以
- TIM_ICPrescaler:分频因子,设置为1分频,也就是不分频
- TIM_ICSelection:输入通道。二进制01对应的通道宏定义为TIM_ICSelection_DirectTI。
到这一步,似乎还是不清楚跟输入捕获有什么关系,如何确定输入的频率。 实现自动化测量,需要配置主从模式。
配置从模式
将TI1FP1信号设置为复位时基单元的触发信号。TI1FP1表示Timer Input 1 Filtered Channel 1,意味着来自通道1的外部信号(经过滤波器)将作为TIM3的输入触发信号。
TIM_SelectInputTrigger(TIM3,TIM_TS_TI1FP1);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Reset);- TIM_SelectInputTrigger:用于选择 TIM3 定时器的输入触发源的函数调用。这意味着 TIM3 定时器将会响应通道1上的外部触发信号,以触发输入捕获操作。
- TIM_SelectSlaveMode:用于配置TIM3定时器的从模式。在这里,从模式被设置为复位模式TIM_SlaveMode_Reset。
测频过程
- 来了一个上升沿,信号会沿着TI1传递到TIM_TS_TI1FP1。
- TIM_TS_TI1FP1会触发TIM3定时器的输入事件,已配置的事件响应办法为复位模式。计数器的值会被重置为初始值。已配置的初始值为0。
- 下一个上升沿到来之前,TIM定时器会持续计数。
- 下一个上升沿到来时,信号会沿着TI1传递到TIM_TS_TI1FP1,触发TIM3定时器的输入事件,输入事件为复位模式。此时,计数器的值为两个上升沿之间的标准频率次数。
- 每次上升沿触发输入捕获时,输入捕获通道都会将计数器的当前值存入CCR。再次熟悉,CCR的直译叫作:捕获/比较寄存器。
- 也就是说,测的是两个上升沿之间的标准频率次数,实现的是测周法。
读取频率
在时基单元中配置的TIM_Period是72分频,也就是说,标准频率为1MHz。 触发上升沿信号时,CCR寄存器存储定时器中的值,也就是标准频率的次数。 一个上升沿出发了N次标准频率,那么这段PWM的频率为:标准频率/N。
uint16_t IC_GetFreq()
{
return 1000000/(TIM_GetCapture1(TIM3) + 1);
}- TIM_GetCapture1用于获取输入捕获通道1的CCR的值。由于存在多个定时器,每个定时器存在多个通道,因此需要明确位置。通道通过函数名指定,定时器通过函数参数指定。
为了方便调试,通过OLED输出各项参数的值。
int main(void)
{
uint16_t FOR=0;
uint16_t BAK=0;
PWM_Init();
Key_Init();
OLED_Init();
IC_Init();
OLED_ShowString(1,1,"FOR:");
OLED_ShowString(2,1,"BAK:");
OLED_ShowString(3,1,"Freq:00000Hz");
while(1)
{
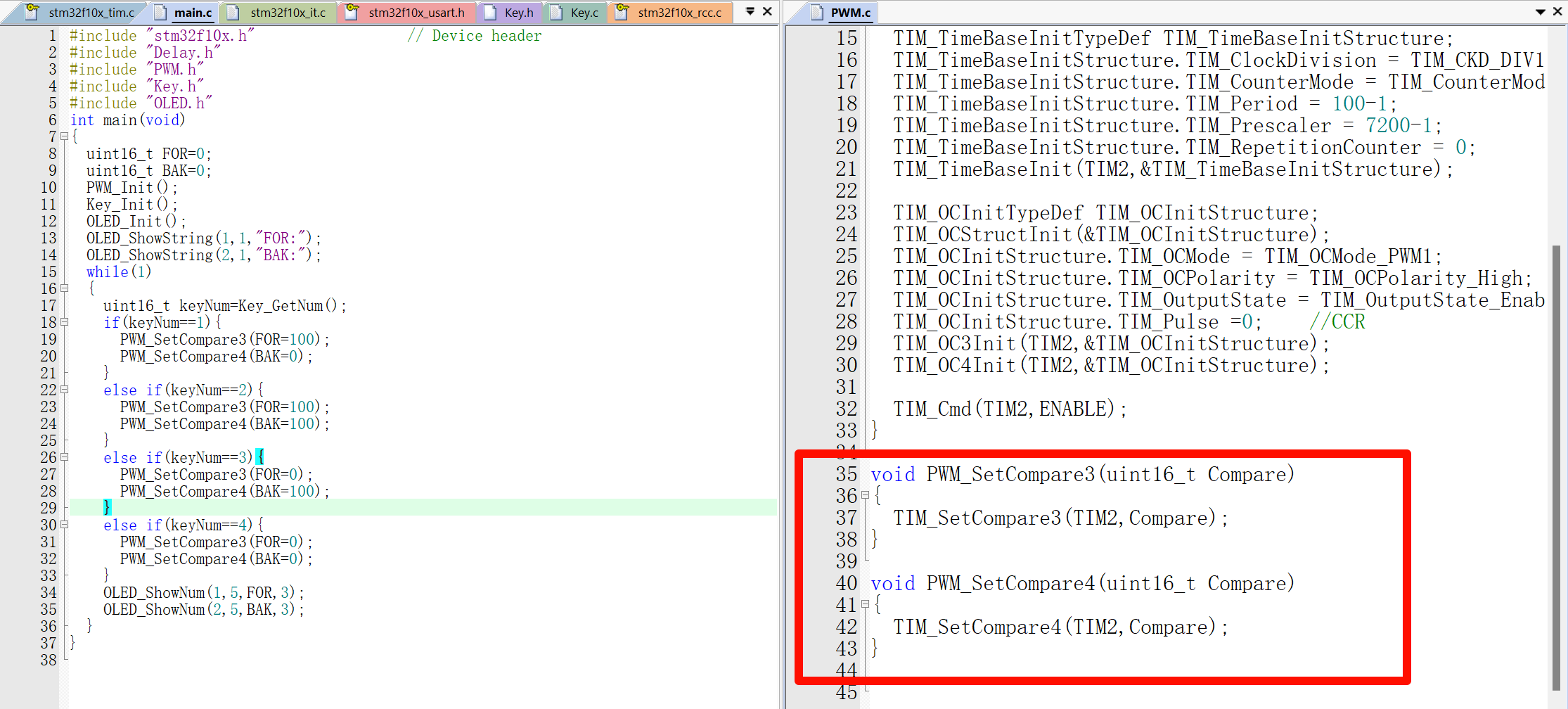
uint16_t keyNum=Key_GetNum();
if(keyNum==1){
PWM_SetCompare3(FOR+=100);
PWM_SetCompare4(BAK+=0);
}
else if(keyNum==2){
PWM_SetCompare3(FOR-=100);
PWM_SetCompare4(BAK-=0);
}
else if(keyNum==3){
PWM_SetCompare3(FOR+=0);
PWM_SetCompare4(BAK+=100);
}
else if(keyNum==4){
PWM_SetCompare3(FOR-=0);
PWM_SetCompare4(BAK-=100);
}
OLED_ShowNum(1,5,FOR,5);
OLED_ShowNum(2,5,BAK,5);
OLED_ShowNum(3,6,IC_GetFreq(),5);
}
}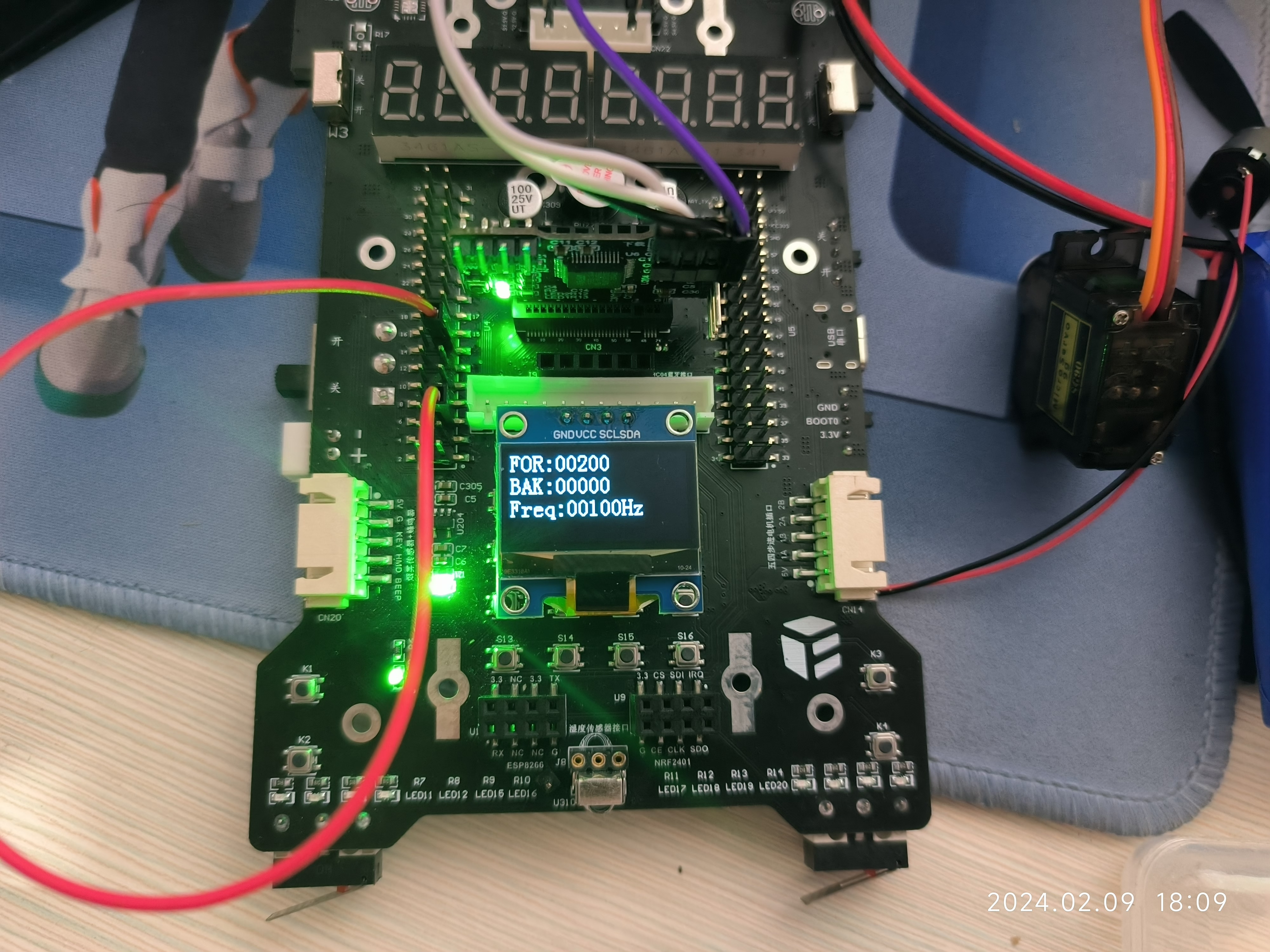
尝试修改FOR和BAK,发现结果都是100Hz。 这是因为,100Hz是PWM波的频率,而FOR和BAK是比较寄存器的值。修改的是占空比,而非频率。 修改频率需要修改分频系数和目标周期数。
总结
CCR寄存器在输入输出中均有应用
CCR 寄存器(Capture/Compare Register,捕获/比较寄存器)在输入和输出中有不同的作用:
- 输入模式:
- 在输入模式下,CCR寄存器用于记录定时器捕获输入信号的时间。当捕获事件(比如上升沿或下降沿)发生时,定时器的计数值会被保存在对应的CCR寄存器中。
- 在输入捕获模式下,CCR寄存器通常用于存储捕获事件的时间戳或脉冲宽度。
- 输出模式:
- 在输出模式下,CCR寄存器用于设置比较值。定时器计数器的值会与CCR寄存器中设置的比较值进行比较,从而决定输出的行为,比如生成PWM信号或者触发输出比较事件。
- 在输出比较模式下,CCR寄存器通常用于设置输出比较的触发点或PWM的占空比。

可以看出,在输出比较中调用的TIM_SetCompare和输入捕获中调用的TIM_GetCapture,访问的都是同一个寄存器,分别进行赋值和取值操作。
频率和占空比
一个输入通道可以分配到两条线路上,分别测量频率和占空比。上面的代码只介绍了频率。 频率和占空比对应的参数是不一样的,不能想当然地通过一条捕获线路全部求出。 在求频率时,直接求得的是CCR寄存器的值,是周期数,实际是“时间”。 要求占空比,可以在线路2捕获下降沿,求出高电平的“时间”。 与整个周期的时间作比,得到的就是占空比。
配置GPIO、时基、OC、IC
命名规范都是:xInitTypeDef xInitStructure。
这只是:配置的“信息”,并不是配置的“过程”。设置完成之后,通过xInit(),将配置信息生效到对应的接口。
配置信息的结构体在声明时,并没有明确指定应用到哪个GPIO引脚或者哪个TIM定时器的哪个通道。这些信息,都在初始化方法中指定,或通过函数参数,或通过函数名。
中断与事件
事件不需要实现中断处理函数,比如在输入捕获中,触发的就是事件,可以通过库函数设置为复位模式,硬件自动复位。
- 若产生的是更新中断,则该信号会通往配置好的 NVIC 定时器通道,此时 CPU 将会响应定时器的更新中断。
- 若产生的是更新事件,更新事件不会触发中断,但可以触发内部其他电路的工作。
如何查阅文档
获取信息的途径:
- 原理图和引脚定义:确定引脚之间的关系。比如LED灯1的引脚为PA8,低电平有效,我可以初始化GPIOA_Pin_8引脚为推挽输出,通过GPIOA_Pin_8控制灯的亮灭。引脚不直接与设备相连时,可以通过飞线的方式,比如在舵机操作中,将PWM波的输出引脚GPIOA_Pin_8通过飞线连接到GPIOB_Pin_12。
- 手册和库函数:哪个设备挂载在哪个总线上,可以在库函数的定义中查询,比如APB1和APB2,库函数定义时指定了挂载的设备。电路走向很难通过代码注释看明白,比如输入捕获时不能通过TIM_ICSelection确定选择的分支,但在宏定义时指明了二进制表示。手册中以二进制形式给出了分支的二进制表示。结合定义和手册,可以确定要填写的是什么。
C语言项目中的“宏定义”与“魔法数”
"魔法数"通常指的是在编程中出现的硬编码数字或常量,这些数字在代码中直接使用,而没有提供明确的解释或者注释。这样的做法可能会导致代码难以理解、维护困难以及可读性差等问题。 尽管手册给出了二进制表示,但实际代码中能用宏就用宏,一串0011会在代码维护上造成不小的麻烦,应尽量避免“魔法数”。使用有意义的命名常量或者枚举来代替,这样可以增加代码的可读性和可维护性。