ROS下用集成开发环境VScode创建工作空间与功能包(C++)
ROS下用集成开发环境VScode创建工作空间与功能包(C++)

用户10922923
发布于 2024-04-10 10:13:59
发布于 2024-04-10 10:13:59
集成开发环境VScode下创建的前提是在ubuntu下安装了ROS系统,并在VScode中下载了插件:
1、创建ROS工作空间
使用命令行工具创建ROS工作空间,这将成为我们开发ROS项目的根目录。在工作空间中,我将组织和管理我们的ROS功能包以及其他相关文件。

创建完毕后,在输入code+空格+.打开VScode,接下来配置vscode,
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件
{
"version": "2.0.0",
"tasks": [
{
"type": "catkin_make",
"args": [
"--directory",
"/home/leige/demo02_ws",
"-DCMAKE_BUILD_TYPE=RelWithDebInfo"
],
"problemMatcher": [
"$catkin-gcc"
],
"group": "build",
"label": "catkin_make: build"
}
]
}选定 src 右击 ---> create catkin package
设置包名 添加依赖
roscpp rospy std_msgs
用C++实现功能:
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
}补齐代码提示:修改c++17就行;

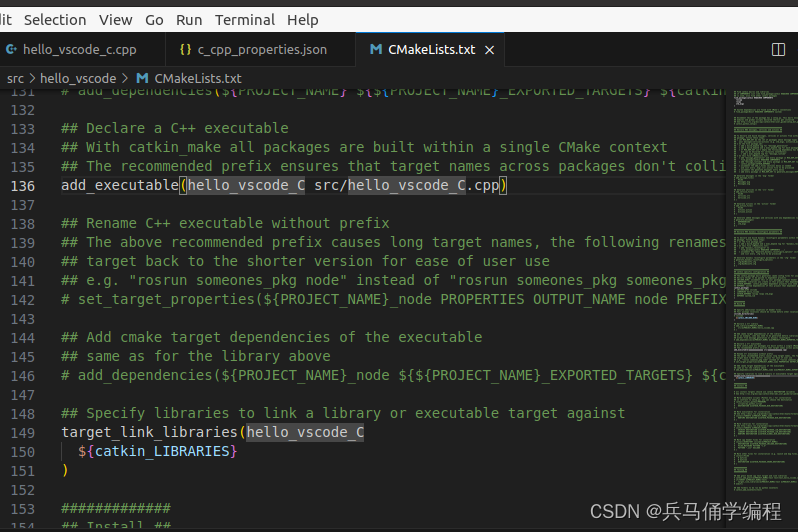
c++配置
add_executable(节点名称
src/C++源文件名.cpp
)
target_link_libraries(节点名称
${catkin_LIBRARIES}
)

新建终端;roscore;
再新建一个终端

本文参与?腾讯云自媒体分享计划,分享自作者个人站点/博客。
原始发表:2024-04-08,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读