数值计算用Matlab?不,用python | 技术创作特训营第一期
原创数值计算用Matlab?不,用python | 技术创作特训营第一期
原创
1 数值计算用什么
作为理工科的社畜,懂计算会计算是一个必不可少的技能,其中尤其是对于土木工程人来说,结构力学、弹塑性力学、计算力学是数值计算中无法逾越的一道坎。由于Matlab简单使用,好学好操作,工科人往往都喜欢使用Matlab来实现数值算法。但是Matlab有几个缺点:
- Matlab是非开源的国外商业软件,存在安全问题以及盗版侵权问题;
- Matlab的安装包极大,对电脑的的要求很高;
- Matlab的跨平台能力较弱,编写出来的程序往往只能在安装了Matlab的机器上运行。

为了解决这些缺点,我们可以转而使用python来编写数值计算程序,当前的python版本支持多进程和多线程计算,numpy和sympy等高性能计算模块的开源共享使得python程序的计算性能和速度已经不输于matlab了。且python是开源的免费软件,一直为国内外的大神所维护能够保证性能和安全;python最新版的安装包才40M左右,十分轻量,在低配电脑上也有十分不错的兼容性;python可以在目前已知所有的操作系统上运行,编写一套代码可以在几乎所有的平台上运行。
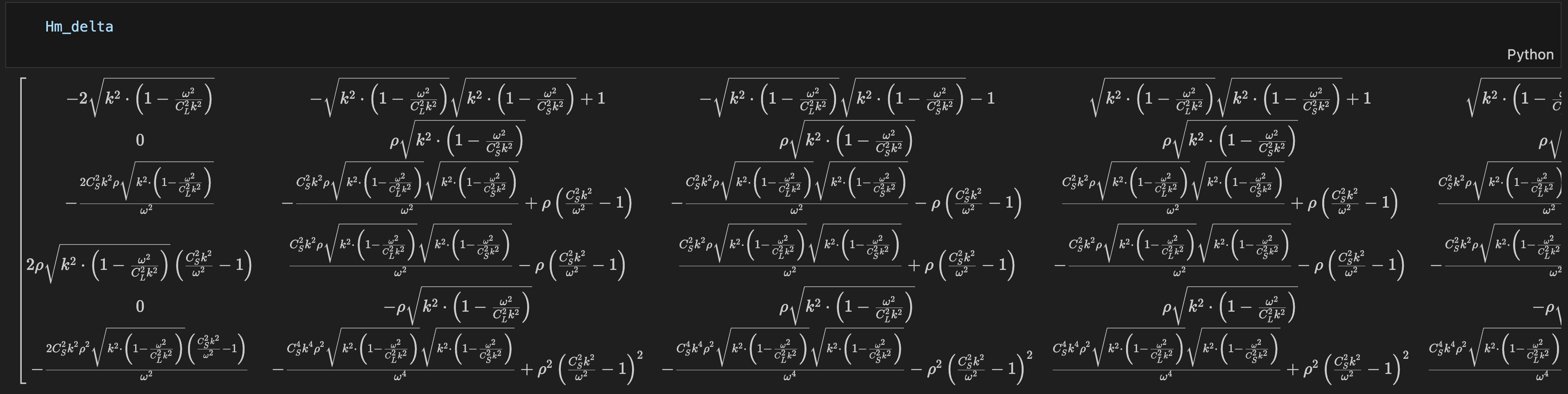
基于以上的优点,这里强烈推荐一款python的计算模块:Sympy,他能够实现可视化的符号运算,并且与ipython兼容性十分不错,能够输出latex的可视化计算结果,如下图所示。本文将简要介绍Sympy的常用功能,并基于弹性力学给出一个计算模型作为算例,用于演示sympy在理工科的应用实战。
2 sympy的安装与使用
sympy是一个开源模块,开源地址在github.com/sympy,代码包含详细的功能文档,建议直接fork下载查看。
2.1 安装
sympy已经进入了PyPI,可以使用pip或conda直接安装:
# Install the sympy modules using pip
pip install sympy
# Install the sympy modules using conda
conda install -c sympy2.2 在jupyter notebook中显示公式
ipython的jupyter notebook支持加载mathjax脚本,能够实现可视化展示latex公式。在使用sympy可视化展示公式时,可以直接通过定义符号变量,并进行相关的运算来实现复杂公式的呈现,如下图所示:
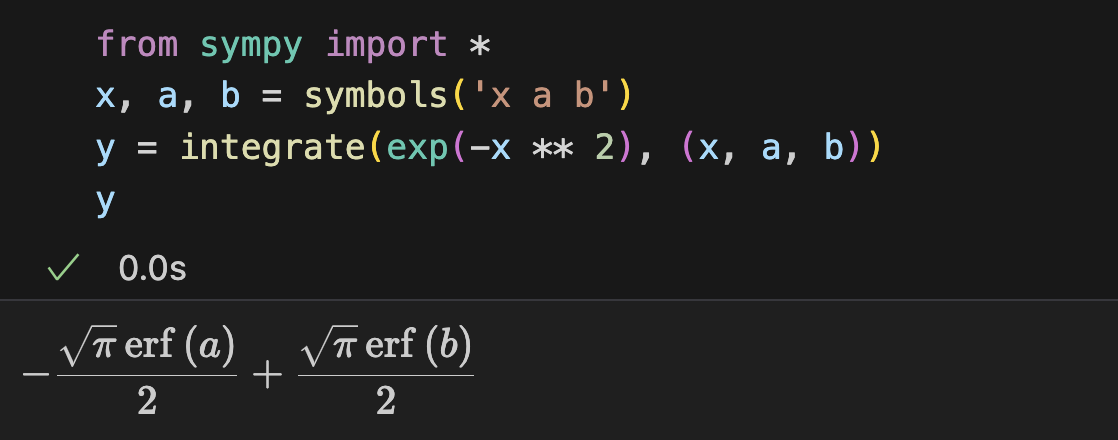
当然也可以直接输出latex代码以嵌入至latex文档:
from sympy import *
x, a, b = symbols('x a b')
y = integrate(exp(-x ** 2), (x, a, b))
# 输出latex代码
latex(y)
### output ###
- \frac{\sqrt{\pi} \operatorname{erf}{\left(a \right)}}{2} + \frac{\sqrt{\pi} \operatorname{erf}{\left(b \right)}}{2}3 sympy常用功能
3.1 申明变量
通过symbols方法将字符串声明为符号变量,。
import sympy
# 声明单个变量
x=sympy.symbols('x')
print(x)
# 声明多个变量,以下三个方法都可以
x,y=sympy.symbols(['x','y'])
x,y=sympy.symbols("x,y")
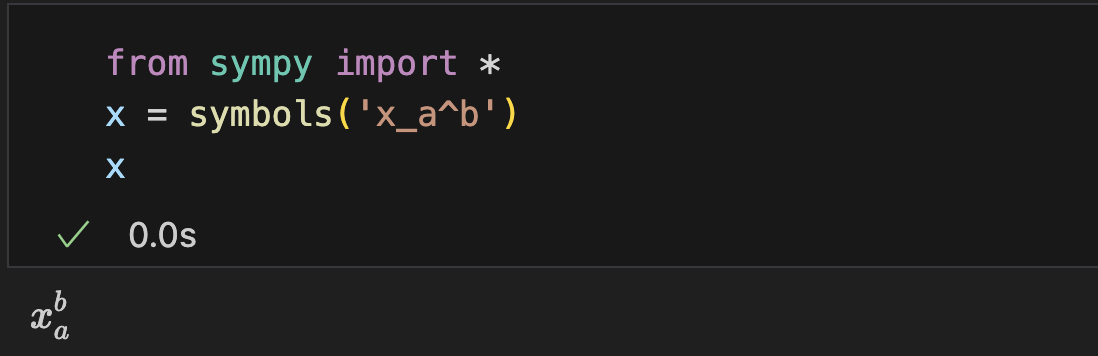
x,y=sympy.symbols("x y")另外在使用symbols申明新的符号变量时,支持latex的上下标语法,如下图所所示:
3.2 函数表达式(Expr)
3.2.1 构造函数
#### 函数表达式通过变量的运算构造具体函数,或者通过Function函数构造抽象函数。
# 具体函数
f=sympy.sqrt(3*x*y)+x*sympy.sin(y)+y**2+x**3
# 抽象函数
u=sympy.function('u')3.2.2 变量替换和数字赋值
#### 变量替换与赋值
# expr.subs()可以实现变量替换,替换成数字实现赋值。
g1=f.subs(x,y) # 将f表达式中的x换成y,并将替换的结果赋给g
g2=f.subs({x:2*x,y:2*y}) # 多次替换,字典
g3=f.subs({x:1,y:2})3.2.3 精确求值
expr.evalf((n))可以求一个表达式的保留n位有效数字的精确值
#### 精确值
# expr.evalf(n)可以求一个表达式的保留n位有效数字的精确值
g3=f.subs({x:1,y:2})
print(g.evalf(4)) # 保留n位有效数字的精确值,8.3593.2.4微分
sympy可以实现求微分,方法如下
### 微分
# sympy可以实现自动求微分,方法如下
h1=sympy.diff(f,x)
h1=f.diff(x) #同上
h2=sympy.diff(f,x,2,y,1)
# f对x求2次微分,对y求1次微分3.2.5 积分
ympy可以实现自动求不定积分和定积分,区别在于是否传入积分上下限
#### 积分
# 可以实现自动求不定积分和定积分,区别在于是否传入积分上下限
l1=sympy.integrate(f,x) #不定积分
l2=sympy.integrate(f,(x,1,3)) # 定积分3.3 极限
sympy可以实现求极限,注意极限方向
##### sympy可以实现求极限,注意极限方向
# 趋于无穷
lim1=sympy.limit(f,x,sympy.oo)
# 趋于0,默认值dir="0",也就是趋于+0
lim2=sympy.limit(f,x,0)
# 趋于0,默认值dir="+"调整为dir="_",也就是趋于-0
lim3=sympy.limit(f,x,0,dir="-")3.4 解方程
sympy可以实现解方程,方法是令Expr=0,所以在解方程时,要先构造一个等于0的左端项。返回结果是一个列表,每一项是一个解。如果是方程组,解列表每一项是一个元组,元组对应位置是对应自变量的值。求解方程是要函数是solveset,使用语法是solveset(equation, variable=None, domain=S.Complexes),分别是等式(默认等于0,),变量,定义域。sp.solveset(E1,x,domain=sp.Reals)
请注意,函数solve也可以用于求解方程式,solve(equations, variables)
#### sympy可以实现解方程,方法是令Expr=0,所以在解方程时,要先构造宇哥
#### 等于0的左端项。返回结果是一个列表,每一项是一个解,如果是方程组,解
#### 解列表每一项是一个元组,元组对应位置是对应自变量的值
func=f-3
# 返回f=3时x的值
sympy.solve(func,x)
# x**2+y**2=1,x+y=1
sympy.solve([x**2+y**2-1,x+y-1],[x,y])3.5 泰勒展开(不常见,但要会用)
3.5.1 一元展开
sympy可以实现泰勒展开,具体函数抽象函数都可以。但是不能对多元函数同时泰勒展开。
#### 一元展开
# sympy可以实现泰勒展开,具体函数抽象函数都可以。但是不能对多元函数同时泰勒展开。
# f对x在0处泰勒展开到4阶(把这句话记住,下边四个先后顺序就能记住)
taylor1=sympy.series(f,x,0,4)
# f对x在0处泰勒展开到4阶,去除皮亚诺余项
taylor2=sympy.series(f,x,0,4).remove0
# 抽象函数u对x在0处泰勒展开到4阶
taylor=sympy.series(u(x),x,0,4)3.5.2 多元展开
函数的多元泰勒展开可以参考如下的代码。
def Taylor_polynomial_sympy(function_expression, variable_list, evaluation_point, degree):
"""
Mathematical formulation reference:
https://math.libretexts.org/Bookshelves/Calculus/Supplemental_Modules_(Calculus)/Multivariable_Calculus/3%3A_Topics_in_Partial_Derivatives/Taylor__Polynomials_of_Functions_of_Two_Variables
:param function_expression: Sympy expression of the function
:param variable_list: list. All variables to be approximated (to be "Taylorized")
:param evaluation_point: list. Coordinates, where the function will be expressed
:param degree: int. Total degree of the Taylor polynomial
:return: Returns a Sympy expression of the Taylor series up to a given degree, of a given multivariate expression, approximated as a multivariate polynomial evaluated at the evaluation_point
"""
from sympy import factorial, Matrix, prod
import itertools
n_var = len(variable_list)
point_coordinates = [(i, j) for i, j in (zip(variable_list, evaluation_point))] # list of tuples with variables and their evaluation_point coordinates, to later perform substitution
deriv_orders = list(itertools.product(range(degree + 1), repeat=n_var)) # list with exponentials of the partial derivatives
deriv_orders = [deriv_orders[i] for i in range(len(deriv_orders)) if sum(deriv_orders[i]) <= degree] # Discarding some higher-order terms
n_terms = len(deriv_orders)
deriv_orders_as_input = [list(sum(list(zip(variable_list, deriv_orders[i])), ())) for i in range(n_terms)] # Individual degree of each partial derivative, of each term
polynomial = 0
for i in range(n_terms):
partial_derivatives_at_point = function_expression.diff(*deriv_orders_as_input[i]).subs(point_coordinates) # e.g. df/(dx*dy**2)
denominator = prod([factorial(j) for j in deriv_orders[i]]) # e.g. (1! * 2!)
distances_powered = prod([(Matrix(variable_list) - Matrix(evaluation_point))[j] ** deriv_orders[i][j] for j in range(n_var)]) # e.g. (x-x0)*(y-y0)**2
polynomial += partial_derivatives_at_point / denominator * distances_powered
return polynomial3.5.3 查看展开项的系数
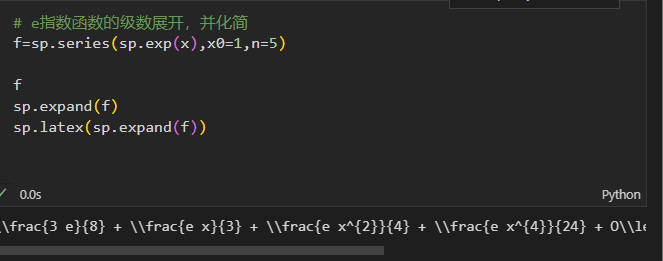
taylor.coeff(x) # 查看taylor1中项(x-x0)的系数3.6 e的展开级数并化简
# e指数函数的级数展开,并化简
f=sp.series(sp.exp(x),x0=1,n=5)
print(f)
### output ###
E + E*(x_a^b - 1) + E*(x_a^b - 1)**2/2 + E*(x_a^b - 1)**3/6 + E*(x_a^b - 1)**4/24 + O((x_a^b - 1)**5, (x_a^b, 1))
sp.expand(f)
# 输出latex代码
sp.latex(sp.expand(f))
3.6.1 e的指数级数的展开

3.6.2 化简
3.7 表达式具体输入值
# 表达式输入具体值
expr=sp.exp(x)+1
expr
3.8 符号化表达式
# 符号化表达式
str_expr='(x+1)**2'
expr=sp.sympify(str_expr)
expr
3.9 极限
# 极限
sp.Sum(1/x**2,(x,1,sp.oo)).doit()############ 什么意思
sp.limit((1+1/x)**x,x,sp.oo)
3.10 计算导数
# 计算导数
expr=sp.sin(x)
sp.diff(expr,x,2)
# 多元函数偏导
sp.sin(x*y).diff(x,1)
3.10.1 对x求两次导
3.10.2 对多元函数求偏导

3.11 积分运算(integrate)
3.11.1 不定积分
3.11.2 定积分
3.12 解方程
# 解方程
E1=sp.Eq(x**2+3*x-4,0)
E1
### domain=sp.Reals用于求解方程
# 求解方程是要函数是solveset,
# 使用语法是solveset(equation, variable=None, domain=S.Complexes/Reals #复数集),
# 分别是等式(默认等于0,),变量,定义域。
sp.solveset(E1,x,domain=sp.Reals)
E2=sp.Eq(x**2+3*x+4,0)
E2
sp.solveset(E2,x,domain=sp.Complexes)
sp.solveset(E2,x,domain=sp.Reals)
3.13 解微分方程
# 解微分方程
# 建立函数变量
f=sp.symbols('y',cls=sp.Function)
E3=sp.Eq(f(x).diff(x)-2*f(x),sp.sin(x))
sp.dsolve(E3,f(x))
3.14 矩阵运算
#### 矩阵运算
# 构造矩阵
sp.Matrix([[1,-1],[2,3],[3,4]])
sp.Matrix([1,2,3])
# 转置
sp.Matrix([1,2,3]).T
A=sp.Matrix([[1,2],[-2,1]])
B=sp.Matrix([[3,4],[-1,2]]).T
A+B
A*B
A**2
B**2 # 得出结论:B转置后B**2结果也会转置
EA.tanspose() 为EA的转置矩阵EA.H 为EA的共轭转置矩阵
3.14.1 伴随矩阵
A = Matrix([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
A
adj_A=A.adjugate()
adj_A
4 通过Rayleigh-Ritz法应用板理论计算板的变形
一块薄板在两端受到压力时将会出现屈曲现象,板两端受压的力学模型如下图所示。
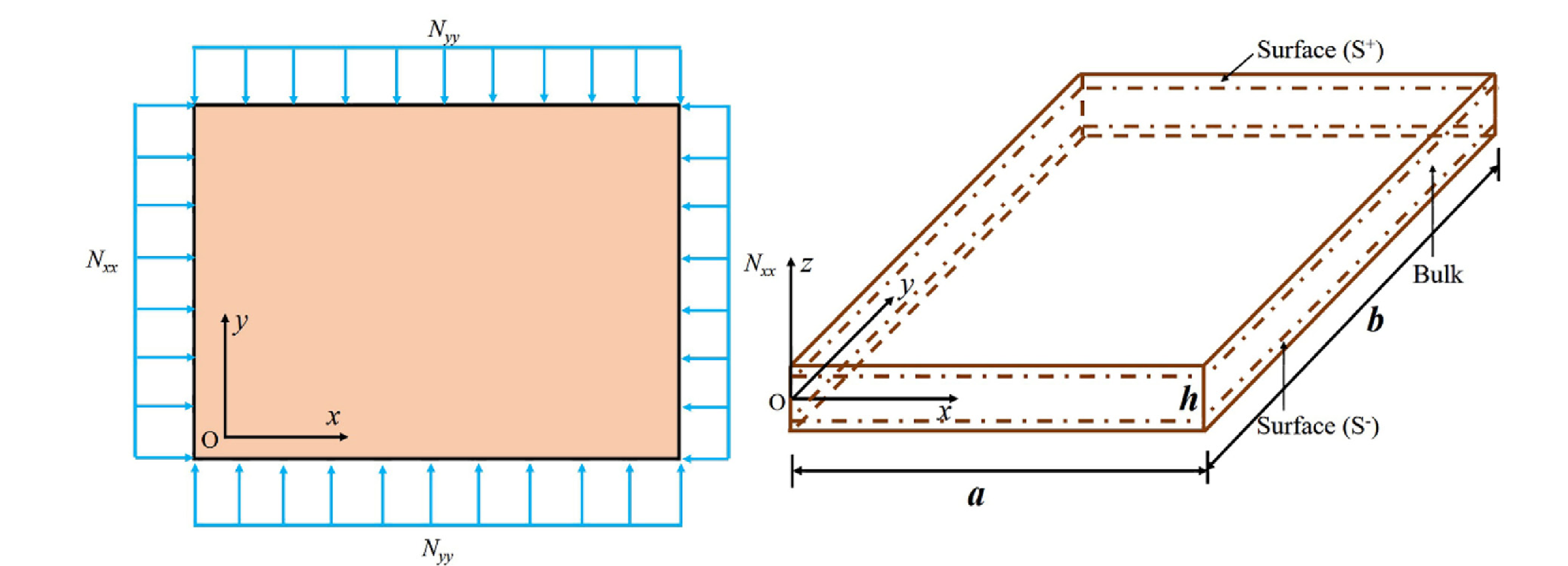
使用Rayleigh-Ritz法计算板的变形^2,高阶剪切板理论选用Kirchoff板理论,板的挠度表达式如公式所示^1:
其中:u_x 和u_y 分别为板单元x方向和y方向的位移,w\left( x,y,z\right) =w(x,y) 表示假定板的挠度沿z方向处的挠度处处相同。
板内部单元的应变为:
其中,\epsilon_{ii} 表示i 方向上的正应变,\gamma_{ij} 表示i 方向上朝j 方向上的剪应变。板的单元应力为:
其中,\sigma_{ii} 为板中i方向上的正应力,\sigma_{ij} 为板中i方向上朝j方向上的剪应力,\tau^s 为表面剪应力。\mu^{s} 和\mu^{ss} 分别为和板的物理参数有关的超参数。
令:
则应力公式可以表示为:
其中,\mathbf{B} 和\mathbf{B^s} 的表达式见参考文献^1。
构造系统总势能方程:
其中,外力做工的表达式和应变能表达式如下所示:
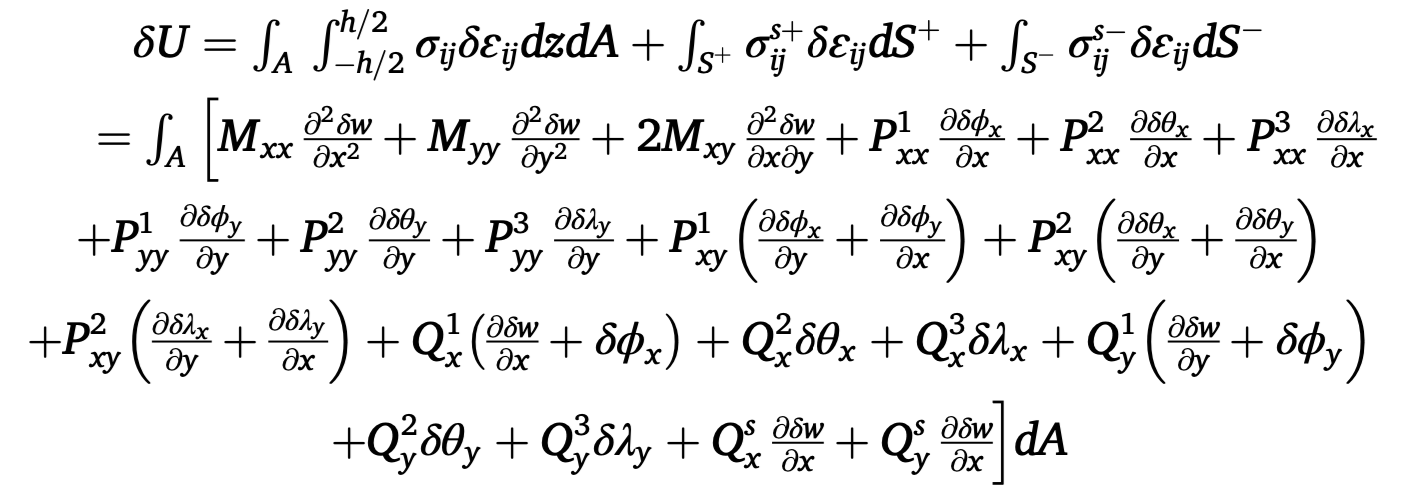
其中涉及到所有的变量计算表达式见参考文献^1中公式的16和17,力边界条件见公式18和19。
板的边界条件可以分为3类:SSSS、CCCC、CCSS三种,分别为四端绞支、四端固支和两端绞支和两端固支。具体的表达式见公式21、22和23。使用高阶多项式拟合板的挠度曲线:
其中:\left( \phi_{xmn} ,\theta_{xmn} ,\lambda_{xmn} ,\phi_{ymn} ,\theta_{ymn} ,\lambda_{ymn} ,W_{mn}\right) 为位移形函数的待定系数。X_m(x),Y_n(y) 为位移形函数,应当选为完备函数,如三角函数、多项式函数或小波函数等。在参考文献中,位移形函数选的是三角函数。
根据系统总势能方程,将位移形函数的表达式代入至外力做功和应变能函数中,总势能方程可以表示成如下形式:
其中,
由于位移形函数为未知量,要使得总势能方程左侧等于0,则矩阵\mathbf{K} 必须不满秩,即矩阵K的行列式等于0,即\det \left( \mathbf{K} \right)=0
基于以上的推导过程,编写相应的计算程序求解:
import numpy as np
from sympy import *
# Double integral
def integrate2(f, x, y):
g = integrate(f, x)
g = integrate(g, y)
return g
# Double differential
def diffn(f, x, n):
while n != 0:
f = diff(f, x)
n = n - 1
return f
# The program is used to solve the problem of critical buckling force of thin plates
ST = 0
# Define the condition of the boundary
BC = 3
m = n = 1
C11 = 263E9
C12 = 154E9
C44 = 127E9
h = 0.8
a = 10
b = 10
# h = 50E-9
# b = a = 10 * h
E = 25.5E9
# E = (C11 - C12) * (C11 + 2 * C12) / (C11 + C12)
v = 0.2
# v = C12 / (C11 + C12)
# Modified coefficient of the shear stress
k = Symbol('k')
x, y, z = symbols('x y z')
w_xx, w_yy, w_xy, w_x, w_y = symbols('w_xx w_yy w_xy w_x w_y')
theta_xx, theta_yy, theta_xy, theta_yx, theta_x, theta_y = symbols('theta_xx theta_yy theta_xy theta_yx theta_x theta_y')
lambda_xx, lambda_yy, lambda_xy, lambda_yx, lambda_x, lambda_y = symbols('lambda_xx lambda_yy lambda_xy lambda_yx lambda_x lambda_y')
phi_xx, phi_yy, phi_xy, phi_yx, phi_x, phi_y = symbols('phi_xx phi_yy phi_xy phi_yx phi_x phi_y')
Gxy = G = E / 2 / (1 + v)
# Gxy = G = C44
Diff = E * h ** 3 / 12 / (1 - v ** 2)
DF = E * h ** 3
NCr = k * pi ** 2 * Diff / (a ** 2)
kv = 0
print('Plate Thickness: h=', h, 'm')
print('Length to thickness ratio: a/h=', a / h)
print('length to width ratio: a/b=', a / b)
if BC == 1:
print('Boundary Condition: SSSS')
# First-order buckling in two directions
alphaM = m * pi / a
beltaN = n * pi / b
Xm = sin(alphaM * x)
Yn = sin(beltaN * y)
D1Xm = cos(x * alphaM) * alphaM ** 1
D2Xm = -sin(x * alphaM) * alphaM ** 2
D3Xm = -cos(x * alphaM) * alphaM ** 3
D4Xm = sin(x * alphaM) * alphaM ** 4
D1Yn = cos(y * beltaN) * beltaN ** 1
D2Yn = -sin(y * beltaN) * beltaN ** 2
D3Yn = -cos(y * beltaN) * beltaN ** 3
D4Yn = sin(y * beltaN) * beltaN ** 4
if BC == 2:
print('Boundary Condition: CCCC')
alphaM = (m + 0.5) * pi / a
beltaN = (n + 0.5) * pi / b
Xm = sin(alphaM * x) - sinh(alphaM * x) - (sin(alphaM * a) - sinh(alphaM * a)) /\
(cos(alphaM * a) - cosh(alphaM * a)) * (cos(alphaM * x) - cosh(alphaM * x))
Yn = sin(beltaN * y) - sinh(beltaN * y) - (sin(beltaN * b) - sinh(beltaN * b)) /\
(cos(beltaN * b) - cosh(beltaN * b)) * (cos(beltaN * y) - cosh(beltaN * y))
D1Xm = cos(x * alphaM) * alphaM - cosh(x * alphaM) * alphaM - (sin(a * alphaM) - sinh(a * alphaM))\
* (-sin(x * alphaM) - sinh(x * alphaM) * alphaM) / (cos(a * alphaM) - cosh(a * alphaM))
D2Xm = -sin(x * alphaM) * alphaM ** 2 - sinh(x * alphaM) * alphaM ** 2 - (sin(a * alphaM) - sinh(a * alphaM)) \
* (-cos(x * alphaM) * alphaM ** 2 - cosh(x * alphaM) * alphaM ** 2) / (cos(a * alphaM) - cosh(a * alphaM))
D3Xm = -cos(x * alphaM) * alphaM **3 - cosh(x * alphaM) * alphaM ** 3 - (sin(a * alphaM) - sinh(a * alphaM)) \
* (sin(x * alphaM) * alphaM ** 3 - sinh(x * alphaM) * alphaM ** 3) / (cos(a * alphaM) - cosh(a * alphaM))
D4Xm = sin(x * alphaM) * alphaM ** 4 - sinh(x * alphaM) * alphaM ** 4 - (sin(a * alphaM) - sinh(a * alphaM)) \
* (cos(x * alphaM) * alphaM ** 4 - cosh(x * alphaM) * alphaM ** 4) / (cos(a * alphaM) - cosh(a * alphaM))
D1Yn = cos(y * beltaN) * beltaN - cosh(y * beltaN) * beltaN - (sin(b * beltaN) - sinh(b * beltaN))\
* (-sin(y * beltaN) * beltaN - sinh(y * beltaN) * beltaN) / (cos(b * beltaN) - cosh(b * beltaN))
D2Yn = -sin(y * beltaN) * beltaN ** 2 - sinh(y * beltaN) * beltaN ** 2 - (sin(b * beltaN) - sinh(b * beltaN)) \
* (-cos(y * beltaN) * beltaN ** 2 - cosh(y * beltaN) * beltaN ** 2) / (cos(b * beltaN) - cosh(b * beltaN))
D3Yn = -cos(y * beltaN) * beltaN ** 3 - cosh(y * beltaN) * beltaN ** 3 - (sin(b * beltaN) - sinh(b * beltaN)) \
* (sin(y * beltaN) * beltaN ** 3 - sinh(y * beltaN) * beltaN ** 3) / (cos(b * beltaN) - cosh(b * beltaN))
D4Yn = sin(y * beltaN) * beltaN ** 4 - sinh(y * beltaN) * beltaN ** 4 - (sin(b * beltaN) - sinh(b * beltaN)) \
* (cos(y * beltaN) * beltaN ** 4 - cosh(y * beltaN) * beltaN ** 4) / (cos(b * beltaN) - cosh(b * beltaN))
if BC == 3:
print('Boundary Conditions: CCSS')
alphaM = (m + 0.5) * pi / a
beltaN = n * pi / b
Xm = sin(alphaM * x) - sinh(alphaM * a) - (sin(alphaM * a) - sinh(alphaM * a)) / (cos(alphaM * a) - cosh(alphaM * a))\
* (cos(alphaM * x) - cosh(alphaM * x))
Ym = sin(beltaN * y)
D1Xm = cos(x * alphaM) * alphaM - cosh(x * alphaM) * alphaM - (sin(a * alphaM) - sinh(a * alphaM))\
* ((-sin(x * alphaM) * alphaM - sinh(x * alphaM) * alphaM)) / (cos(a * alphaM) - cosh(a * alphaM))
D2Xm = -sin(x * alphaM) * alphaM ** 2 - sinh(x * alphaM) * alphaM ** 2 - (sin(a * alphaM) - sinh(a * alphaM))\
* (-cos(x * alphaM) * alphaM ** 2 - cosh(x * alphaM) * alphaM ** 2) / (cos(a * alphaM) - cosh(a * alphaM))
D3Xm = -cos(x * alphaM) * alphaM ** 3 - cosh(x * alphaM) * alphaM ** 3 - (sin(a * alphaM) - sinh(a * alphaM))\
* (sin(x * alphaM) * alphaM ** 3 - sinh(a * alphaM) * alphaM ** 3) / (cos(a * alphaM) - cosh(a * alphaM))
D4Xm = sin(x * alphaM) * alphaM ** 4 - sinh(x * alphaM) * alphaM ** 4 - (sin(a * alphaM) - sinh(a * alphaM))\
* (cos(x * alphaM) * alphaM ** 4 - cosh(x * alphaM) * alphaM ** 4) / (cos(a * alphaM) - cosh(a * alphaM))
D1Yn = cos(y * beltaN) * beltaN
D2Yn = -sin(y * beltaN) * beltaN ** 2
D3Yn = -cos(y * beltaN) * beltaN ** 3
D4Yn = sin(y * beltaN) * beltaN ** 4
PT = 1
for i in range(0, 1, 2):
kar = 1
if PT == 2:
kar = 5 / 6
R1 = R2 = R3 = 0
Rz1 = Rz2 = Rz3 = 0
Rp1 = Rp2 = Rp3 = 0
Rn1 = Rn2 = Rn3 = 0
Rz1p = Rz2p = Rz3p = 0
Rz1n = Rz2n = Rz3n = 0
print('Plate Theory: Kirchoff Plate')
########################## strain ###################################
varepsilon_xx = (R1 - z) * w_xx + R1 * phi_xx + R2 * theta_xx + R3 * lambda_xx
varepsilon_yy = (R1 - z) * w_yy + R1 * phi_yy + R2 * theta_yy + R3 * lambda_yy
gamma_xy = 2 * (R1 - z) * w_xy + R1 * (phi_xy + phi_yx) + R2 * (theta_xy + theta_yx) + R3 * (lambda_xy + lambda_yx)
gamma_xz = Rz1 * (w_x + phi_x) + Rz2 * theta_x + Rz3 * lambda_x
gamma_yz = Rz1 * (w_y + phi_y) + Rz2 * theta_y + Rz3 * lambda_y
########################## corrected stress ###################################
sigma_xx = E / (1 - v ** 2) * (varepsilon_xx + v * varepsilon_yy)
sigma_yy = E / (1 - v ** 2) * (varepsilon_yy + v * varepsilon_xx)
sigma_xy = G * gamma_xy
sigma_xz = G * gamma_xz
sigma_yz = G * gamma_yz
########################## Strain on the top surface ###################################
varepsilon_xxsp = (Rp1 - h / 2) * w_xx + Rp1 * phi_xx + Rp2 * theta_xx + Rp3 * lambda_xx
varepsilon_yysp = (Rp1 - h / 2) * w_yy + Rp1 * phi_yy + Rp2 * theta_yy + Rp3 * lambda_yy
gamma_xysp = 2 * (Rp1 - h / 2) * w_xy + Rp1 * (phi_xy + phi_yx) + Rp2 * (theta_xy + theta_yx) + Rp3 * (lambda_xy + lambda_yx)
gamma_xzsp = Rz1p * (w_x + phi_x) + Rz2p * theta_x + Rz3p * lambda_x
gamma_yzsp = Rz1p * (w_y + phi_y) + Rz2p * theta_y + Rz3p * lambda_y
varepsilon_xxsp = 1 / 2 * gamma_xysp
varepsilon_xzsp = 1 / 2 * gamma_xzsp
varepsilon_yzsp = 1 / 2 * gamma_xzsp
########################## Strain on the bottom surface ###################################
varepsilon_xxsn = (Rn1 + h / 2) * w_xx + Rn1 * phi_xx + Rn2 * theta_xx + Rn3 * lambda_xx
varepsilon_yysn = (Rn1 + h / 2) * w_yy + Rn1 * phi_yy + Rn2 * theta_yy + Rn3 * lambda_yy
gamma_xysn = 2 * (Rn1 + h / 2) * w_xy + Rn1 * (phi_xy + phi_yx) + Rn2 * (theta_xy + theta_yx) + Rn3 * (lambda_xy + lambda_yx)
gamma_xzsn = Rz1n * (w_x + phi_x) + Rz2n * theta_x + Rz3n * lambda_x
gamma_yzsn = Rz1n * (w_y + phi_y) + Rz2n * theta_y + Rz3n * lambda_y
varepsilon_xysn = 1 / 2 * gamma_xysn
varepsilon_xzsn = 1 / 2 * gamma_xzsn
varepsilon_yzsn = 1 / 2 * gamma_yzsn
Mxx = integrate(sigma_xx * (R1 - z), (z, -h / 2, h / 2))
Myy = integrate(sigma_yy * (R1 - z), (z, -h / 2, h / 2))
Mxy = integrate(sigma_xy * (R1 - z), (z, -h / 2, h / 2))
Pxx1 = integrate(sigma_xx * R1, (z, -h / 2, h / 2))
Pxx2 = integrate(sigma_xx * R2, (z, -h / 2, h / 2))
Pxx3 = integrate(sigma_xx * R3, (z, -h / 2, h / 2))
Pyy1 = integrate(sigma_yy * R1, (z, -h / 2, h / 2))
Pyy2 = integrate(sigma_yy * R2, (z, -h / 2, h / 2))
Pyy3 = integrate(sigma_yy * R3, (z, -h / 2, h / 2))
Pxy1 = integrate(sigma_xy * R1, (z, -h / 2, h / 2))
Pxy2 = integrate(sigma_xy * R2, (z, -h / 2, h / 2))
Pxy3 = integrate(sigma_xy * R3, (z, -h / 2, h / 2))
Qx1 = integrate(kar * sigma_xz * Rz1, (z, -h / 2, h / 2))
Qx2 = integrate(kar * sigma_xz * Rz2, (z, -h / 2, h / 2))
Qx3 = integrate(kar * sigma_xz * Rz3, (z, -h / 2, h / 2))
Qy1 = integrate(kar * sigma_yz * Rz1, (z, -h / 2, h / 2))
Qy2 = integrate(kar * sigma_yz * Rz2, (z, -h / 2, h / 2))
Qy3 = integrate(kar * sigma_yz * Rz3, (z, -h / 2, h / 2))
Axx = Mxx.coeff(w_xx)
Bxx = Mxx.coeff(w_yy)
C1xx = Mxx.coeff(phi_xx)
C2xx = Mxx.coeff(theta_xx)
C3xx = Mxx.coeff(lambda_xx)
D1xx = Mxx.coeff(phi_yy)
D2xx = Mxx.coeff(theta_yy)
D3xx = Mxx.coeff(lambda_yy)
E1xx = Mxy.coeff(w_xy)
F1xx = Mxy.coeff(phi_xy)
F2xx = Mxy.coeff(theta_xy)
F3xx = Mxy.coeff(lambda_xy)
G1xx = Pxx1.coeff(w_xx)
H1xx = Pxx1.coeff(w_yy)
I11xx = Pxx1.coeff(phi_xx)
I12xx = Pxx1.coeff(theta_xx)
I13xx = Pxx1.coeff(lambda_xx)
J11xx = Pxx1.coeff(phi_yy)
J12xx = Pxx1.coeff(theta_yy)
J13xx = Pxx1.coeff(lambda_yy)
G2xx = Pxx2.coeff(w_xx)
H2xx = Pxx2.coeff(w_yy)
I21xx = Pxx2.coeff(phi_xx)
I22xx = Pxx2.coeff(theta_xx)
I23xx = Pxx2.coeff(lambda_xx)
J21xx = Pxx2.coeff(phi_yy)
J22xx = Pxx2.coeff(theta_yy)
J23xx = Pxx2.coeff(lambda_yy)
G3xx = Pxx3.coeff(w_xx)
H3xx = Pxx3.coeff(w_yy)
I31xx = Pxx3.coeff(phi_xx)
I32xx = Pxx3.coeff(theta_xx)
I33xx = Pxx3.coeff(lambda_xx)
J31xx = Pxx3.coeff(phi_yy)
J32xx = Pxx3.coeff(theta_yy)
J33xx = Pxx3.coeff(lambda_yy)
K1xx = Pxy1.coeff(w_xy)
L11xx = Pxy1.coeff(phi_xy)
L12xx = Pxy1.coeff(theta_xy)
L13xx = Pxy1.coeff(lambda_xy)
K2xx = Pxy2.coeff(w_xy)
L21xx = Pxy2.coeff(phi_xy)
L22xx = Pxy2.coeff(theta_xy)
L23xx = Pxy2.coeff(lambda_xy)
K3xx = Pxy3.coeff(w_xy)
L31xx = Pxy3.coeff(phi_xy)
L32xx = Pxy3.coeff(theta_xy)
L33xx = Pxy3.coeff(lambda_xy)
S1xx = Qx1.coeff(w_x)
S2xx = Qx2.coeff(w_x)
S3xx = Qx3.coeff(w_x)
T11xx = Qx1.coeff(phi_x)
T12xx = Qx1.coeff(theta_x)
T13xx = Qx1.coeff(lambda_x)
T21xx = Qx2.coeff(phi_x)
T22xx = Qx2.coeff(theta_x)
T23xx = Qx2.coeff(lambda_x)
T31xx = Qx3.coeff(phi_x)
T32xx = Qx3.coeff(theta_x)
T33xx = Qx3.coeff(lambda_x)
A11 = integrate2((I11xx * D3Xm * Yn + L11xx * D1Xm * D2Yn - T11xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A12 = integrate2((I12xx * D3Xm * Yn + L12xx * D1Xm * D2Yn - T12xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A13 = integrate2((I13xx * D3Xm * Yn + L13xx * D1Xm * D2Yn - T13xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A14 = integrate2(((J11xx + L11xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A15 = integrate2(((J12xx + L12xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A16 = integrate2(((J13xx + L13xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A17 = integrate2((G1xx * D3Xm * Yn + (H1xx + K1xx) * D1Xm * D2Yn - S1xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A21 = integrate2((I21xx * D3Xm * Yn + L21xx * D1Xm * D2Yn - T21xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A22 = integrate2((I22xx * D3Xm * Yn + L22xx * D1Xm * D2Yn - T22xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A23 = integrate2((I23xx * D3Xm * Yn + L23xx * D1Xm * D2Yn - T23xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A24 = integrate2(((J21xx + L21xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A25 = integrate2(((J22xx + L22xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A26 = integrate2(((J23xx + L23xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A27 = integrate2((G2xx * D3Xm * Yn + (H2xx + K2xx) * D1Xm * D2Yn - S2xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A31 = integrate2((I31xx * D3Xm * Yn + L31xx * D1Xm * D2Yn - T31xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A32 = integrate2((I32xx * D3Xm * Yn + L32xx * D1Xm * D2Yn - T32xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A33 = integrate2((I33xx * D3Xm * Yn + L33xx * D1Xm * D2Yn - T33xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A34 = integrate2(((J31xx + L31xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A35 = integrate2(((J32xx + L32xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A36 = integrate2(((J33xx + L33xx) * D1Xm * D2Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A37 = integrate2((G3xx * D3Xm * Yn + (H3xx + K3xx) * D1Xm * D2Yn - S3xx * D1Xm * Yn) * D1Xm * Yn, (x, 0, a), (y, 0, b))
A41 = integrate2(((J11xx + L11xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A42 = integrate2(((J12xx + L12xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A43 = integrate2(((J13xx + L13xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A44 = integrate2((I11xx * Xm * D3Yn + L11xx * D2Xm * D1Yn - T11xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A45 = integrate2((I12xx * Xm * D3Yn + L12xx * D2Xm * D1Yn - T12xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A46 = integrate2((I13xx * Xm * D3Yn + L13xx * D2Xm * D1Yn - T13xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A47 = integrate2((G1xx * Xm * D3Yn + (H1xx + K1xx) * D2Xm * D1Yn - S1xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A51 = integrate2(((J21xx + L21xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A52 = integrate2(((J22xx + L22xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A53 = integrate2(((J23xx + L23xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A54 = integrate2((I21xx * Xm * D3Yn + L21xx * D2Xm * D1Yn - T21xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A55 = integrate2((I22xx * Xm * D3Yn + L22xx * D2Xm * D1Yn - T22xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A56 = integrate2((I23xx * Xm * D3Yn + L23xx * D2Xm * D1Yn - T23xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A57 = integrate2((G2xx * Xm * D3Yn + (H2xx + K2xx) * D2Xm * D1Yn - S2xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A61 = integrate2(((J31xx + L31xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A62 = integrate2(((J32xx + L32xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A63 = integrate2(((J33xx + L33xx) * D2Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A64 = integrate2((I31xx * Xm * D3Yn + L31xx * D2Xm * D1Yn - T31xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A65 = integrate2((I32xx * Xm * D3Yn + L32xx * D2Xm * D1Yn - T32xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A66 = integrate2((I33xx * Xm * D3Yn + L33xx * D2Xm * D1Yn - T33xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A67 = integrate2((G3xx * Xm * D3Yn + (H3xx + K3xx) * D2Xm * D1Yn - S3xx * Xm * D1Yn) * Xm * D1Yn, (x, 0, a), (y, 0, b))
A71 = integrate2((C1xx * D4Xm * Yn + (D1xx + 2 * F1xx) * D2Xm * D2Yn - T11xx * D2Xm * Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A72 = integrate2((C2xx * D4Xm * Yn + (D2xx + 2 * F2xx) * D2Xm * D2Yn - T12xx * D2Xm * Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A73 = integrate2((C3xx * D4Xm * Yn + (D3xx + 2 * F3xx) * D2Xm * D2Yn - T13xx * D2Xm * Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A74 = integrate2((C1xx * Xm * D4Yn + (D1xx + 2 * F1xx) * D2Xm * D2Yn - T11xx * Xm * D2Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A75 = integrate2((C2xx * Xm * D4Yn + (D2xx + 2 * F2xx) * D2Xm * D2Yn - T12xx * Xm * D2Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A76 = integrate2((C3xx * Xm * D4Yn + (D3xx + 2 * F3xx) * D2Xm * D2Yn - T13xx * Xm * D2Yn) * Xm * Yn, (x, 0, a), (y, 0, b))
A77 = integrate2((Axx * (D4Xm * Yn + Xm * D4Yn) + 2 * (Bxx + E1xx) * D2Xm * D2Yn - S1xx * (Xm * D2Yn + D2Xm * Yn)) * Xm * Yn, (x, 0, a), (y, 0, b))
e1 = integrate2(D2Xm * Yn * Xm * Yn, (x, 0, a), (y, 0, b))
e2 = integrate2(Xm * D2Yn * Xm * Yn, (x, 0, a), (y, 0, b))
e3 = integrate2(D4Xm * Yn * Xm * Yn, (x, 0, a), (y, 0, b))
e4 = integrate2(D2Xm * D2Yn * Xm * Yn, (x, 0, a), (y, 0, b))
e5 = integrate2(Xm * D4Yn * Xm * Yn, (x, 0, a), (y, 0, b))
AP77 = (e1 + e2) * NCr
AK = np.array([[A77 + AP77]])
AK = Matrix(AK)
kk = solve(AK.det(), k)
print('Bulkling intensity factor for Kirchoff plate is k=', kk)
kv = kk[0]
print('The critical pressure is: Ncr=', (pi ** 2 * Diff / (a ** 2) * kv).evalf(6))参考文献
^1: Tong L H, Lin F, Xiang Y, et al. Buckling analysis of nanoplates based on a generic third-order plate theory with shear-dependent non-isotropic surface stressesJ. Composite Structures, 2021, 265: 113708. https://doi.org/10.1016/j.compstruct.2021.113708
^2: 弹性力学:Rayleigh-Ritz法, 吃白饭的休伯利安号,https://www.eatrice.cn/post/RayleighRitzMethod/
选题思路
理工科有着大量的数值计算的需求,现有的大部分的科学计算软件如matlab或mathmatica等均存在体积庞大、使用授权昂贵等问题。而python作为一款开源软件,其轻量、拓展性好、容易上手等完败那些难学的科学计算软件。同时python的用途广泛,学一门语言不仅可以做数值计算、还可以做数据挖掘、人工智能、其他工业软件插件开发等,对于非计算机科班出生的同学性价比极高。
本文介绍了python一款很受欢迎的符号计算模块:sympy,能够让读者了解python数值计算的优势,同时给出了常用功能的简单介绍,使得读者能够对python符号计算有一个完整且直观的理解。最后基于一篇论文的公式推导过程,给出了一个基于弹性力学的符号计算应用案例,更加直观地展现出python符号计算的强大以及其特别的魅力。
创作提纲
- 为什么要使用python进行计算(分析当前常用方法的缺点,指出python计算的优点,引出sympy计算模块)
- sympy的安装与使用(介绍如何安装sympy)
- sympy的常用功能(通过高等数学和线性代数的常见计算场景介绍sympy,使得表达更加直观)
- sympy实际应用案例介绍(详细介绍了复杂公式的推导过程,并给出了相应的计算代码,展示将sympy投入实际应用的效果)
- 参考文献(补充说明资料,数值计算往往是学科融合,需要一定的前置知识)
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。