在Ubuntu 22.04上部署傅利叶机器人仿真环境
原创
背景
在上一篇《在云服务器上部署傅利叶机器人仿真环境》博客中,我详述了如何在腾讯云云服务器CVM中部署傅利叶机器人GR-1仿真环境。本文则回归传统方式,详述在Ubuntu 22.04上部署傅利叶机器人GR-1仿真环境。
本文提供两种部署环境:
- 在本地Macbook Pro中,通过UTM搭建虚拟的Ubuntu 22.04环境;
- 使用云服务商提供的云桌面搭建虚拟的Ubuntu 22.04环境。
另外,在安装的方式上,也不再使用前述文档中的v1.1,而是通过github中master分支直接来安装。参考文档为:https://github.com/FFTAI/rocs_server/blob/main/readme_zh_cn.md
对于环境购买和环境安装不表。
快速装机
在非root账户下,
cd ~
sudo apt update
sudo apt upgrade
wget -qO- https://raw.githubusercontent.com/FFTAI/rocs_server/main/install.sh | bash这个过程时间比较长,请耐心等待。
在仿真环境运行 (Webots)
I. 下载Webots
执行脚本快速安装
cd ~
wget https://github.com/cyberbotics/webots/releases/download/R2023b/webots_2023b_amd64.deb
sudo dpkg -i webots_2023b_amd64.debII. 启动SDK控制程序
cd ~/.rocs_server # 文档中错误的写成了cd ~/.rocs_server/sbin
bash start_up_rocs_svr.sh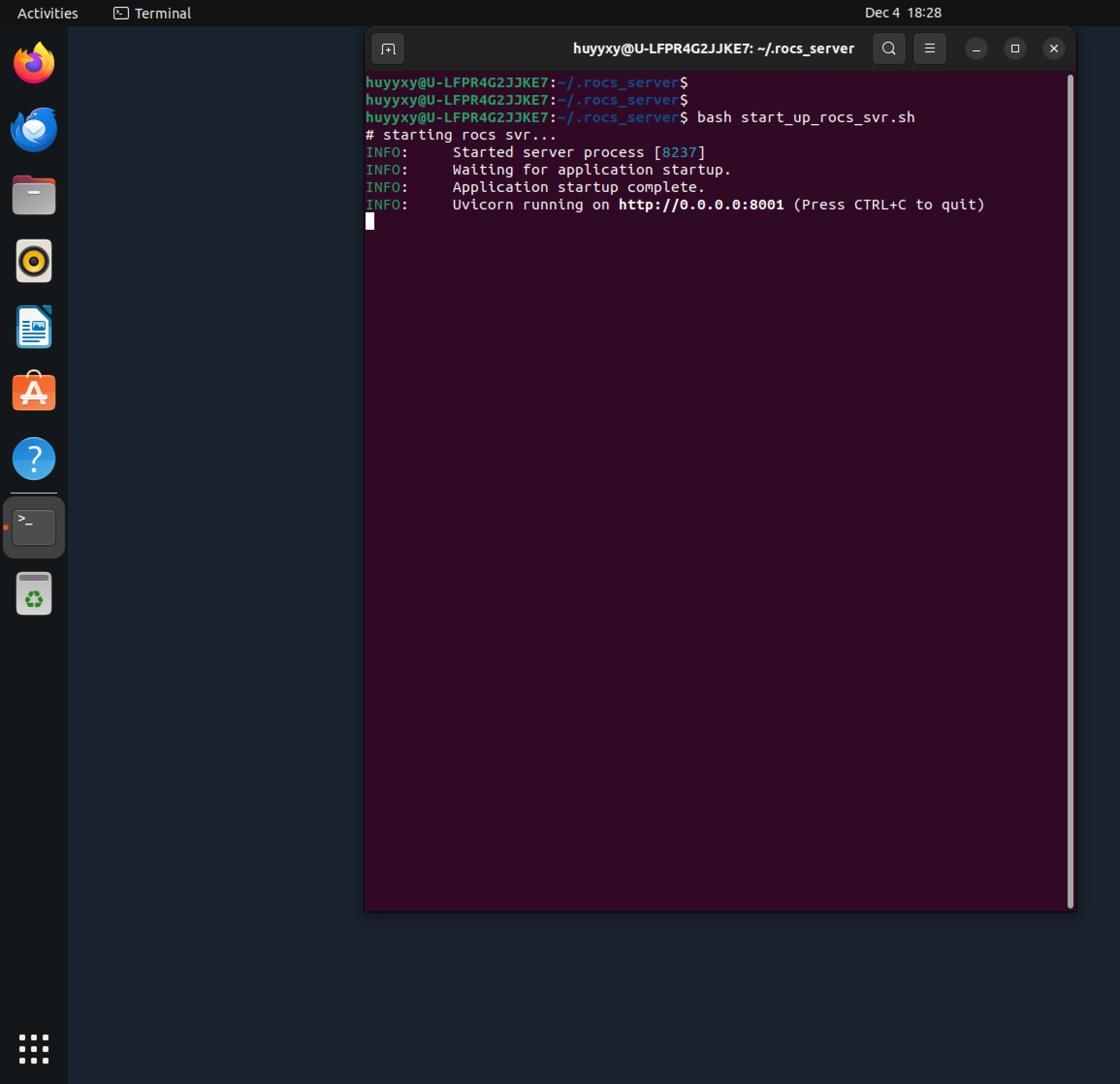
这里有对于云桌面个大坑,对话式LLM完全无法帮助我,就是直接按照上述命令执行,会得到:
~/.rocs_server# ./rocs_svr
./rocs_svr: error while loading shared libraries: libz.so.1: failed to map segment from shared object需要安装如下方式解决:
mkdir /usr/local/tmpdir
sudo chmod 777 /usr/local/tmpdir
export TMP=/usr/local/tmpdirIII. 加载Webots模型
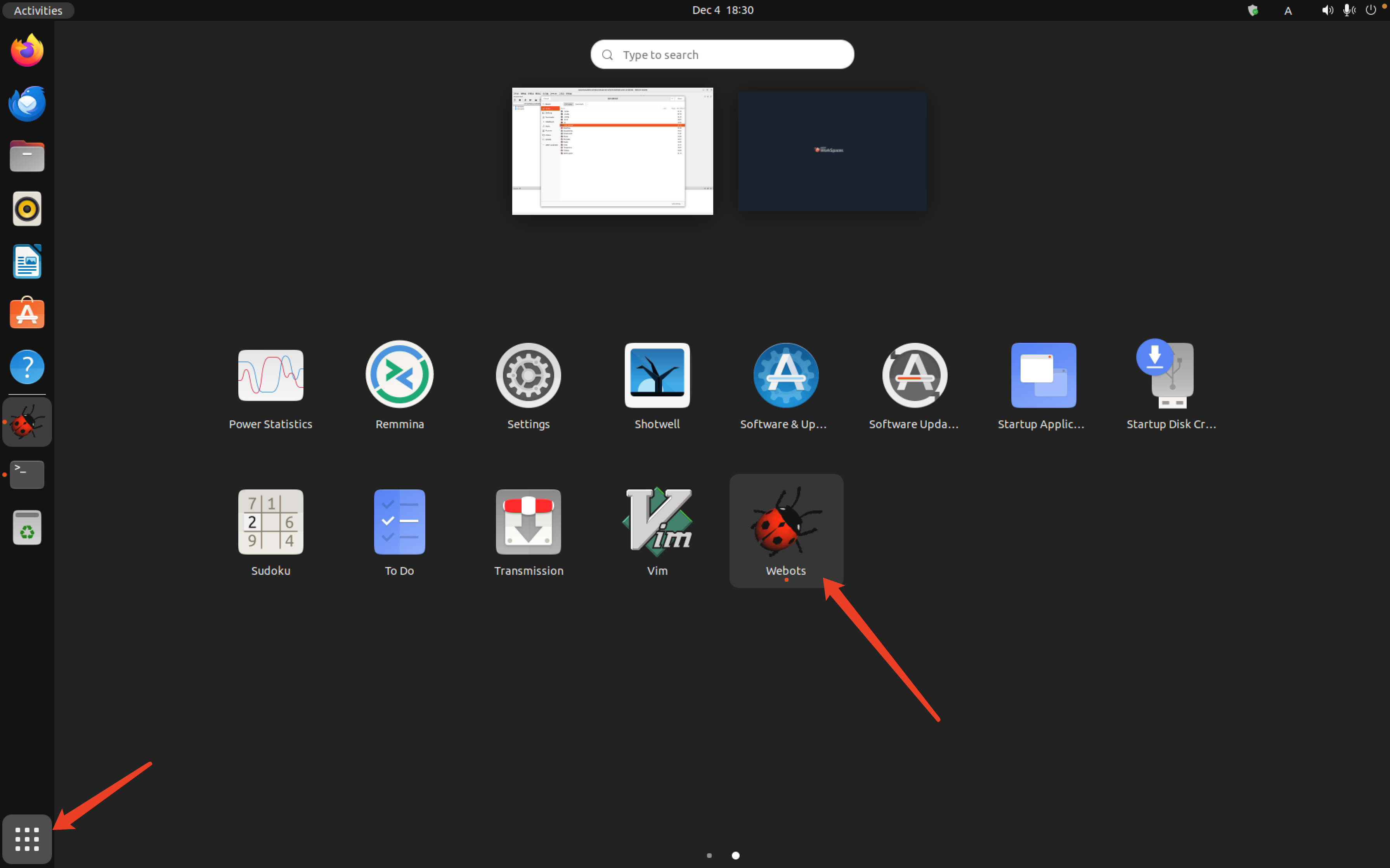
- 打开Webots
点击左下角的9宫格按钮,点击Webots这个瓢虫?图标。
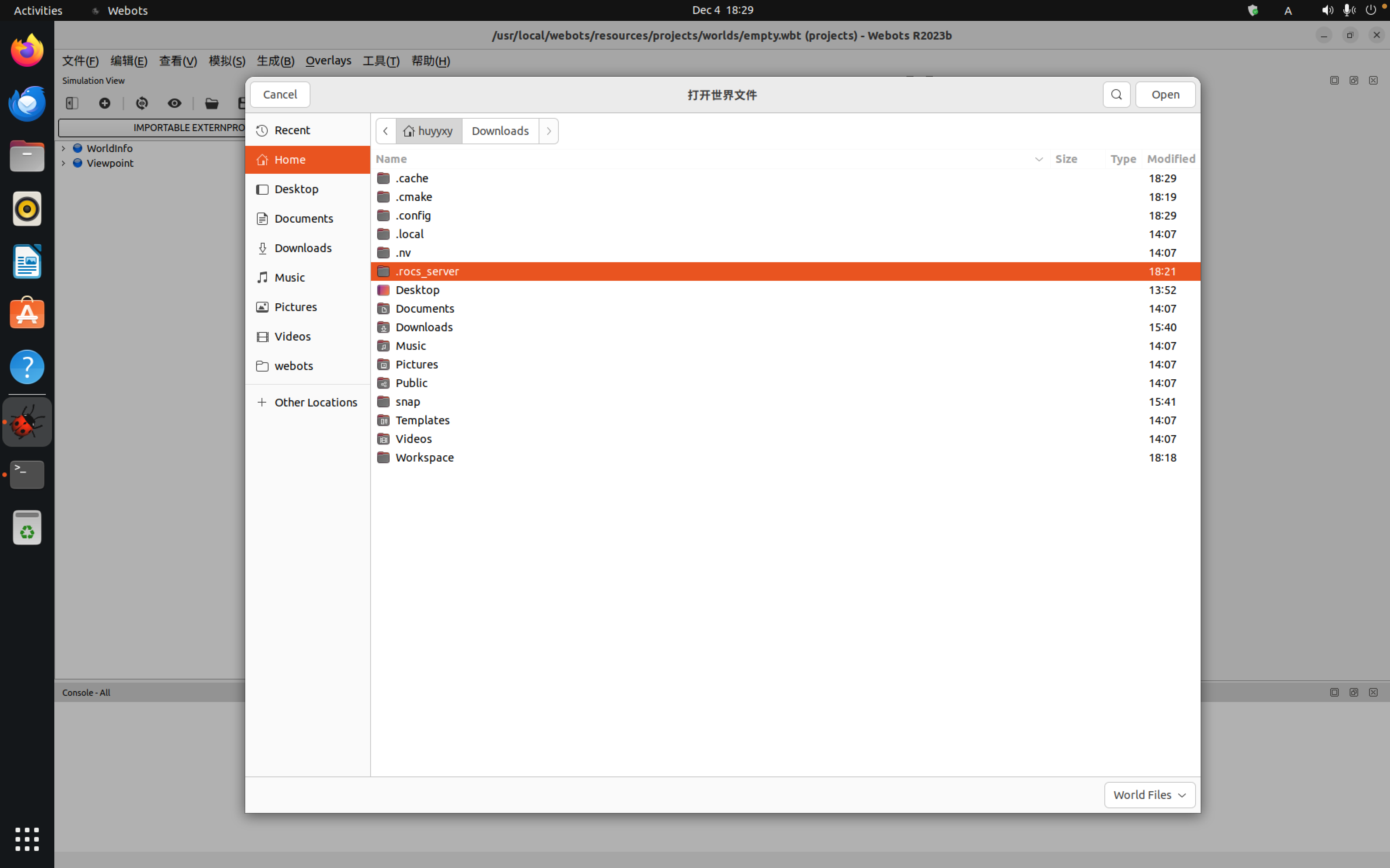
图图点击打开世界文件,进入到Home目录下,使用Ctrl+H显示隐藏文件。 图图
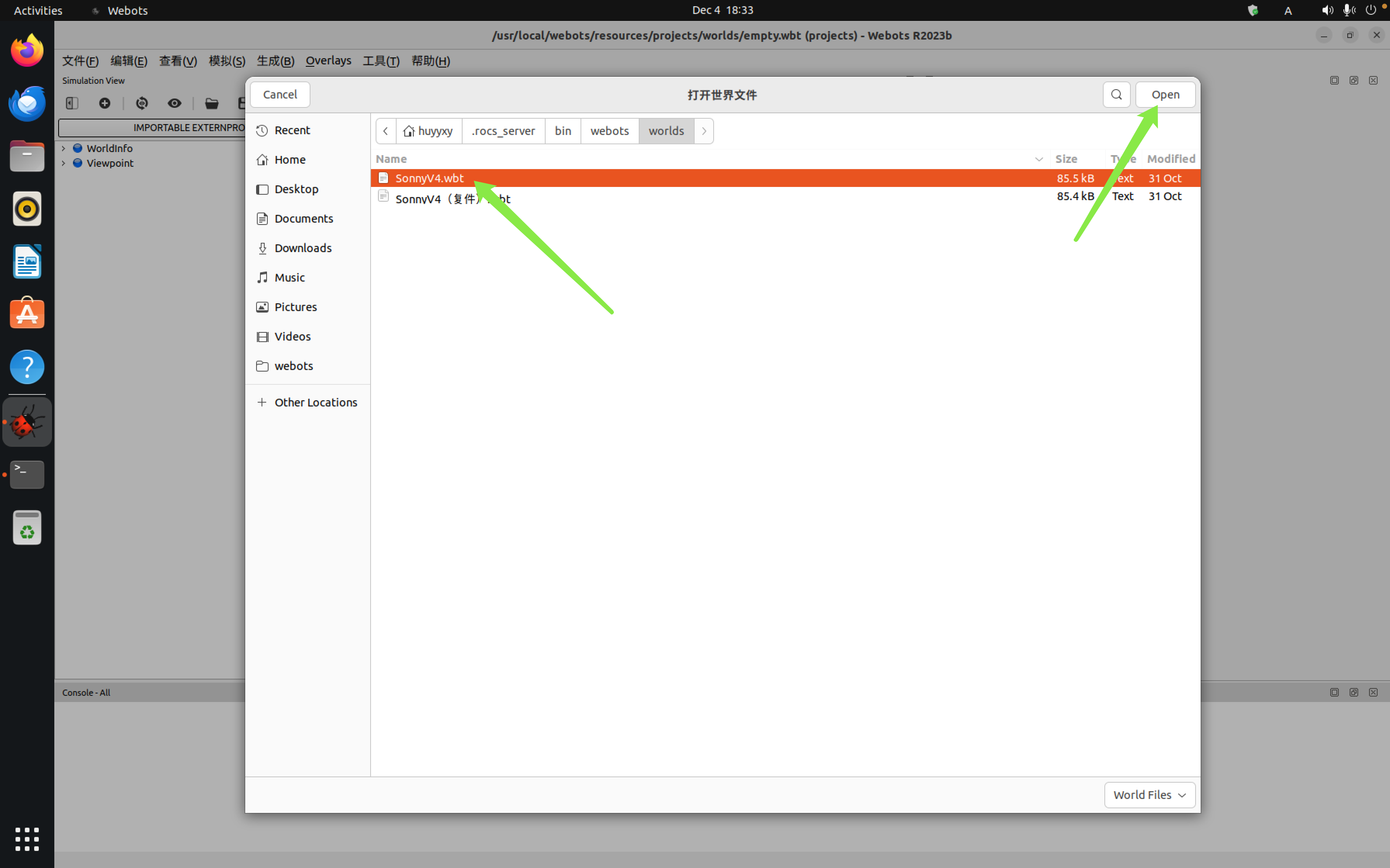
- file -> open world -> ~/.rocs_server/bin/webots/worlds/SonnyV4.wbt
控制机器人
sudo apt install python3-pip
pip3 install rocs_client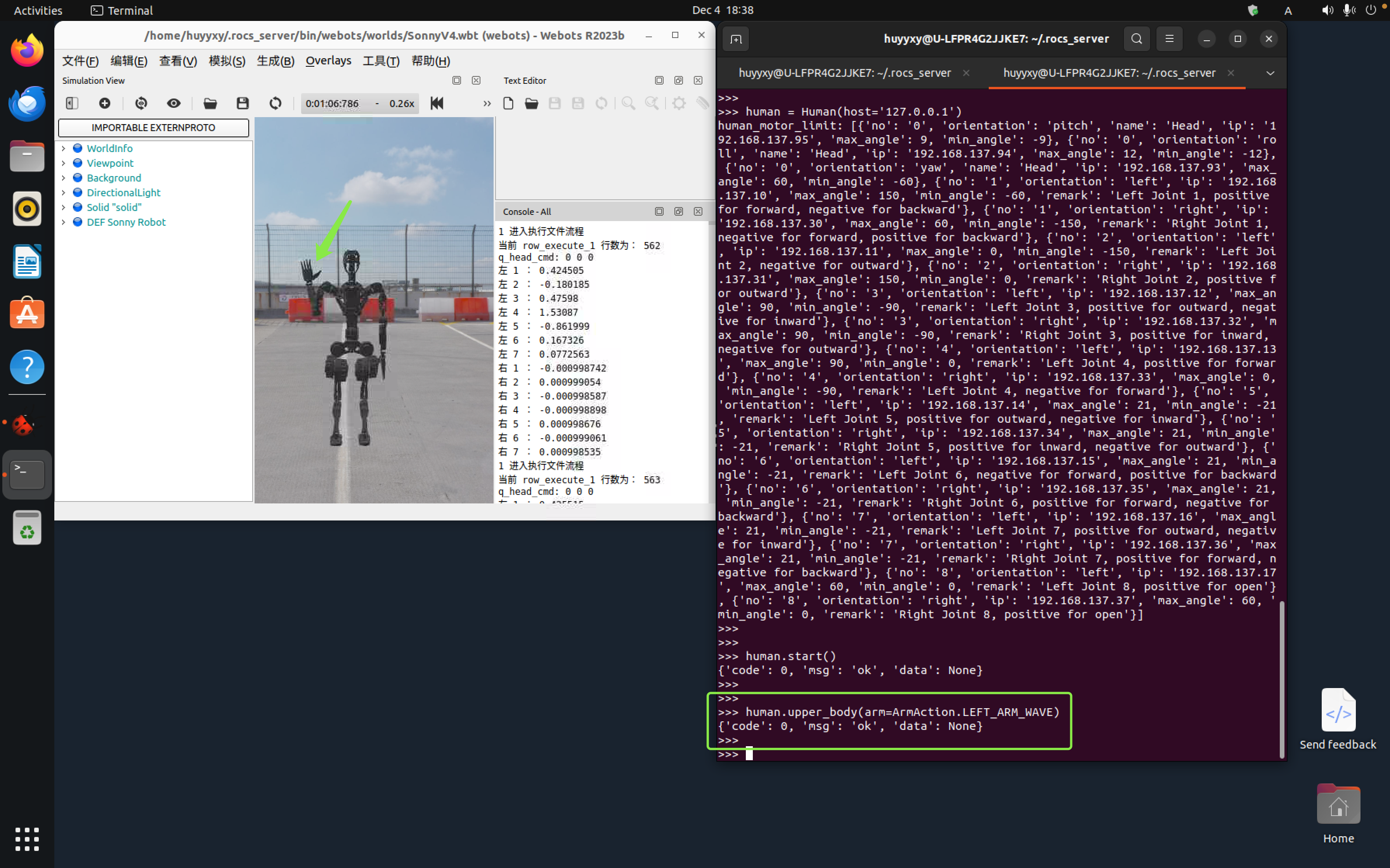
脚本控制机器人
import time
from rocs_client import Human
from rocs_client.robot.human import ArmAction, HandAction, Motor
human = Human(host='127.0.0.1') # Please replace host with the ip of your device
human.start() # Start remote control
time.sleep(10) # Control system built-in state machine. To ensure normal calibration and startup of the robot, it is recommended to execute subsequent instructions after start() instruction for 10s
human.stand() # Stand up,这里如果等待时间不够长,机器人很容易跌倒
human.walk(0, 0.1) # Move forward at a speed of 0.1
human.upper_body(arm=ArmAction.LEFT_ARM_WAVE) # Wave left hand,其他命令见 命令集锦
human.stop()命令集锦
目前傅利叶智能通用机器人GR-1支持的Arm和Hand命令有:
@dataclass
class ArmAction(Enum):
# 归零
RESET = "RESET"
# 左挥手
LEFT_ARM_WAVE = "LEFT_ARM_WAVE"
# 甩胳膊
ARMS_SWING = "ARMS_SWING"
# 打招呼
HELLO = "HELLO"
@dataclass
class HandAction(Enum):
# 半握手
HALF_HANDSHAKE = "HALF_HANDSHAKE"
# 竖大拇指
THUMB_UP = "THUMB_UP"
# 手张开
OPEN = "OPEN"
# 手微屈
SLIGHTLY_BENT = "SLIGHTLY_BENT"
# 抓握
GRASP = "GRASP"
# 抖动手
TREMBLE = "TREMBLE"
# 握手
HANDSHAKE = "HANDSHAKE"详见pypi中的rocs-client 1.3.0 python包。

rocs_client-1.3.0/rocs_client/robot/human.py中。

总结
本文的目标是在Ubuntu 22.04上搭建一个傅利叶机器人仿真环境,并执行示例代码。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
相关产品与服务
云服务器
云服务器(Cloud Virtual Machine,CVM)提供安全可靠的弹性计算服务。 您可以实时扩展或缩减计算资源,适应变化的业务需求,并只需按实际使用的资源计费。使用 CVM 可以极大降低您的软硬件采购成本,简化 IT 运维工作。