多值提取至点Python实现:找到不同栅格相同位置像元
多值提取至点Python实现:找到不同栅格相同位置像元

??本文介绍基于Python语言中的gdal模块,对2景不同的遥感影像加以对应位置像素值匹配的方法——即基于一景遥感影像的每一个像元,提取另一景遥感影像中,与之空间位置相同的像元的像素值的方法。
??首先,明确一下本文的需求。现在有2景成像范围不完全一致、但是具有重叠部分的遥感影像,如下图所示;我们就将其称作大遥感影像(成像范围更大的、灰色系的那一景遥感影像)和小遥感影像(成像范围更小的、蓝色系的那一景遥感影像)。这2景遥感影像的成像范围、空间分辨率、空间坐标系等都不一致(当然,也可以一致;而且如果一致的话,后续处理起来也会更方便理解一些)。
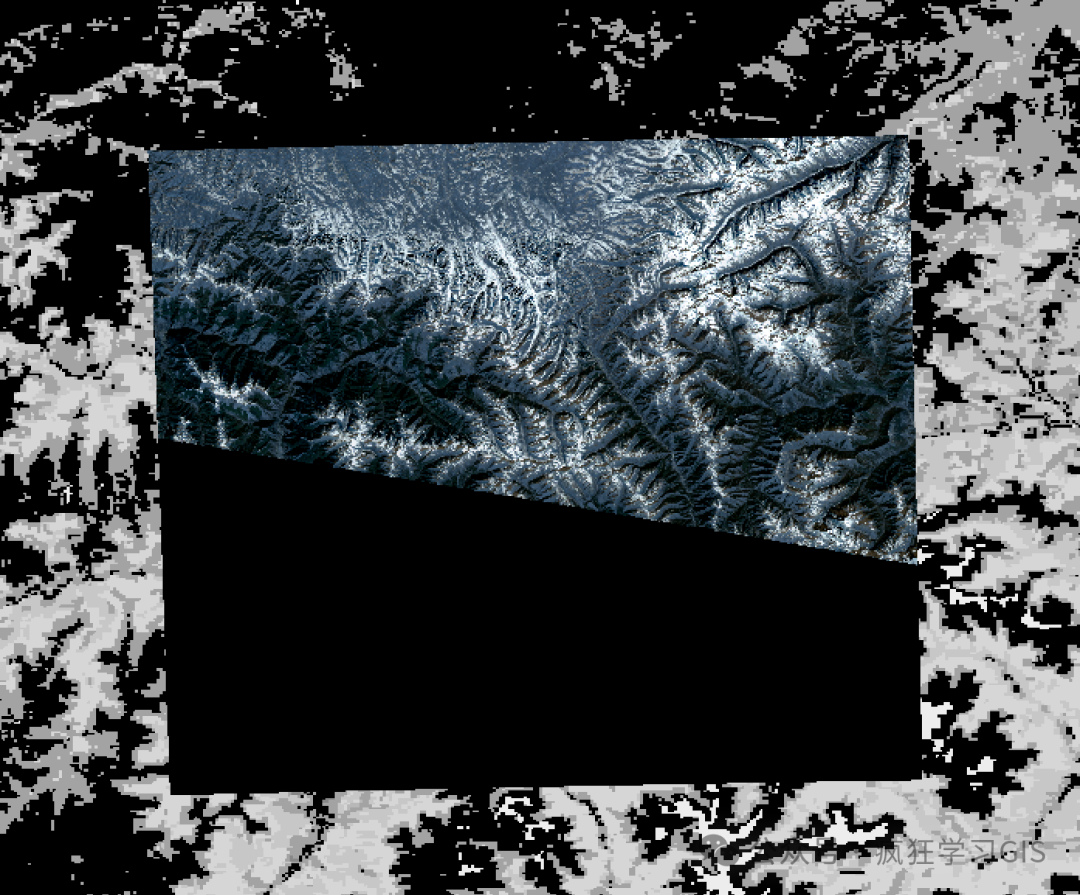
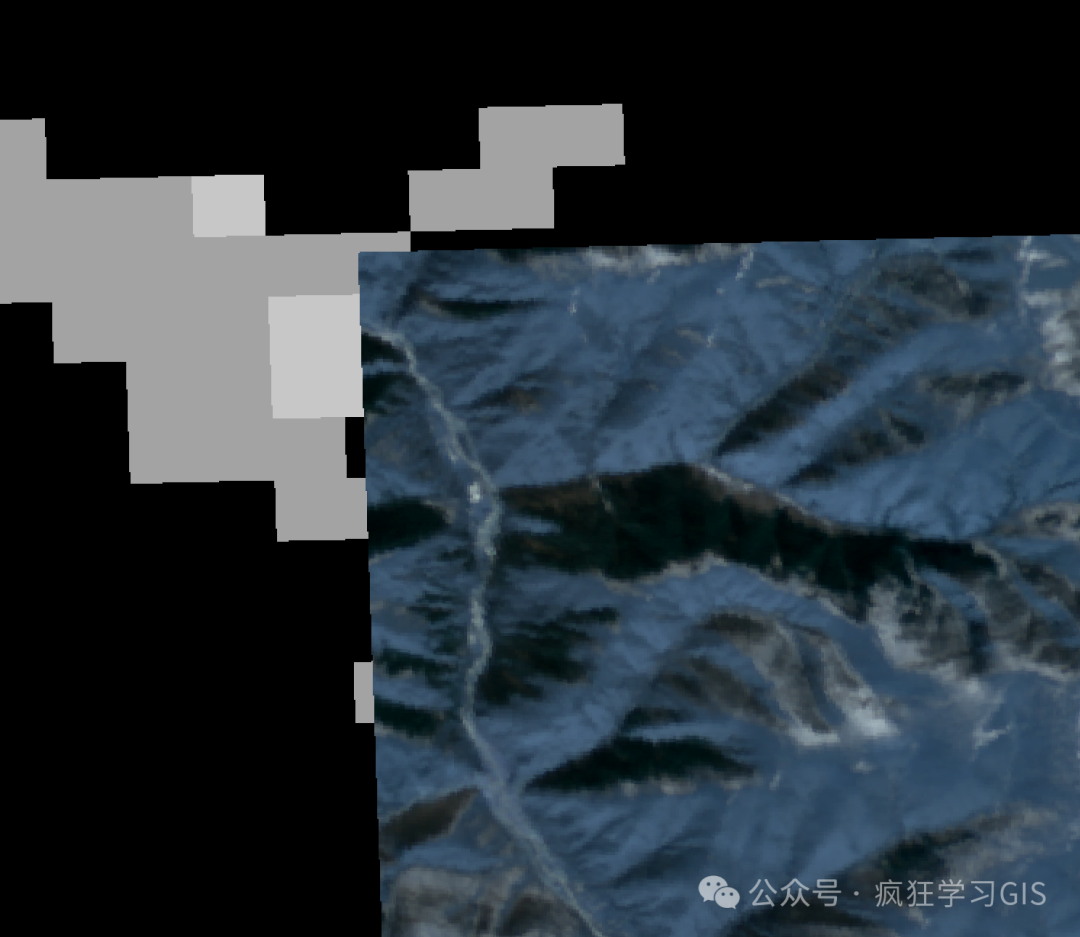
??其中,可以很明显地看到,小遥感影像的空间分辨率高于大遥感影像,但其成像范围是小于大遥感影像的;如下图所示。
??我们现在希望,对于小遥感影像中的每一个像元(除了NoData值的像元),找到其在大遥感影像中对应位置处的像元,并将这个大遥感影像对应像元的像素提取出来。可以认为,我们希望得到2个相同大小的二维数组——这2个二维数组的行数、列数就是小遥感影像的行数与列数,而这2个二维数组的值,分别为小遥感影像的像素值,以及大遥感影像在同一空间位置上的像元的像素值。换句话说,这个需求有点类似于ArcGIS的“多值提取到点”这一工具的作用——只不过相当于我们需要对小遥感影像的每一个像元都执行一次“多值提取到点”操作。
??这里需要注意,如果待处理的2景遥感影像一个为地理坐标系,一个为投影坐标系,那么首先需要将2景遥感影像都处理为同一种类型的坐标系(建议都处理为投影坐标系);具体处理方法,大家可以参考GDAL命令:一行代码转换坐标系这篇文章。
??明确了需求,我们即可开始代码的撰写。本文所用代码如下。
# -*- coding: utf-8 -*-
"""
Created on Sun Feb 18 21:15:08 2024
@author: fkxxgis
"""
import numpy as np
from osgeo import gdal
def raster2array(file_path):
dataset = gdal.Open(file_path)
band = dataset.GetRasterBand(1)
array = band.ReadAsArray()
dataset = None
return array
def get_geotransform(file_path):
dataset = gdal.Open(file_path)
geotransform = dataset.GetGeoTransform()
dataset = None
return geotransform
def get_pixel_size(geotransform):
pixel_size_x = geotransform[1]
pixel_size_y = geotransform[5]
return pixel_size_x, pixel_size_y
def pixel2coordinate(geotransform, pixel_x, pixel_y):
coordinate_x = geotransform[0] + pixel_x * geotransform[1] + pixel_y * geotransform[2]
coordinate_y = geotransform[3] + pixel_x * geotransform[4] + pixel_y * geotransform[5]
return coordinate_x, coordinate_y
gf_file_path = r"F:\Data_Reflectance_Rec\若尔盖GF反射率\2021\GF1WFV1.16m.2021001035028.48STA.000000_SR.tiff"
gf_array = raster2array(gf_file_path)
gf_geotransform = get_geotransform(gf_file_path)
gf_pixel_size_x, gf_pixel_size_y = get_pixel_size(gf_geotransform)
type_file_path = r"F:\Data_Reflectance_Rec\Type\result.tif"
type_array = raster2array(type_file_path)
type_geotransform = get_geotransform(type_file_path)
type_pixel_size_x, type_pixel_size_y = get_pixel_size(type_geotransform)
type_new_array = np.empty_like(gf_array)
for row in range(gf_array.shape[0]):
for col in range(gf_array.shape[1]):
if not gf_array[row, col]:
type_new_array[row, col] = 0
continue;
gf_coordinate_x, gf_coordinate_y = pixel2coordinate(gf_geotransform, col, row)
type_col = int((gf_coordinate_x - type_geotransform[0]) / type_pixel_size_x)
type_row = int((gf_coordinate_y - type_geotransform[3]) / type_pixel_size_y)
type_new_array[row, col] = type_array[type_row, type_col]
??其中,我们首先需要引入必要的库。在本文中,numpy用于处理数组数据,gdal则用于读取栅格数据文件和获取地理转换参数。
??随后,我们定义了几个关键的函数。其中,raster2array()用于将栅格数据文件读取为numpy库的数组,get_geotransform()用于获取栅格数据文件的地理转换参数,get_pixel_size()用于从地理转换参数中提取像素大小,pixel2coordinate()用于将像素坐标转换为地理坐标。
??接下来,我们即可开始读取待处理的数据。在上述代码中,gf_开头的数据就是前文中提到的小遥感影像对应的相关数据,而type_开头的数据就是前文中提到的大遥感影像对应的相关数据。
??首先,我们使用raster2array()函数将小遥感影像读取为数组,并存储在gf_array变量中;随后,使用get_geotransform()函数获取小遥感影像的地理转换参数,并存储在gf_geotransform变量中;接下来,使用get_pixel_size()函数从小遥感影像的地理转换参数中提取像素大小,并分别存储在gf_pixel_size_x和gf_pixel_size_y变量中。
??类似地,对大遥感影像文件同样执行上一段中描述的操作。
??接下来,创建一个与小遥感影像的数组具有相同形状和数据类型的空数组。在这里,我们直接使用np.empty_like()函数创建名为type_new_array的空数组,其形状与gf_array相同。
??随后,遍历小遥感影像的数组(相当于就是按行、按列遍历小遥感影像的全部像元),根据条件进行处理。其中,如果gf_array中的元素为0(也就是我这里小遥感影像的NoData值),则不用再进行后续处理了,直接将type_new_array相应位置的元素也设置为0并继续下一个循环。而如果gf_array中的元素不为0,根据像素坐标和地理转换参数进行计算,从类型数据数组type_array中获取相应位置的值,并将其赋值给type_new_array相应位置的元素。
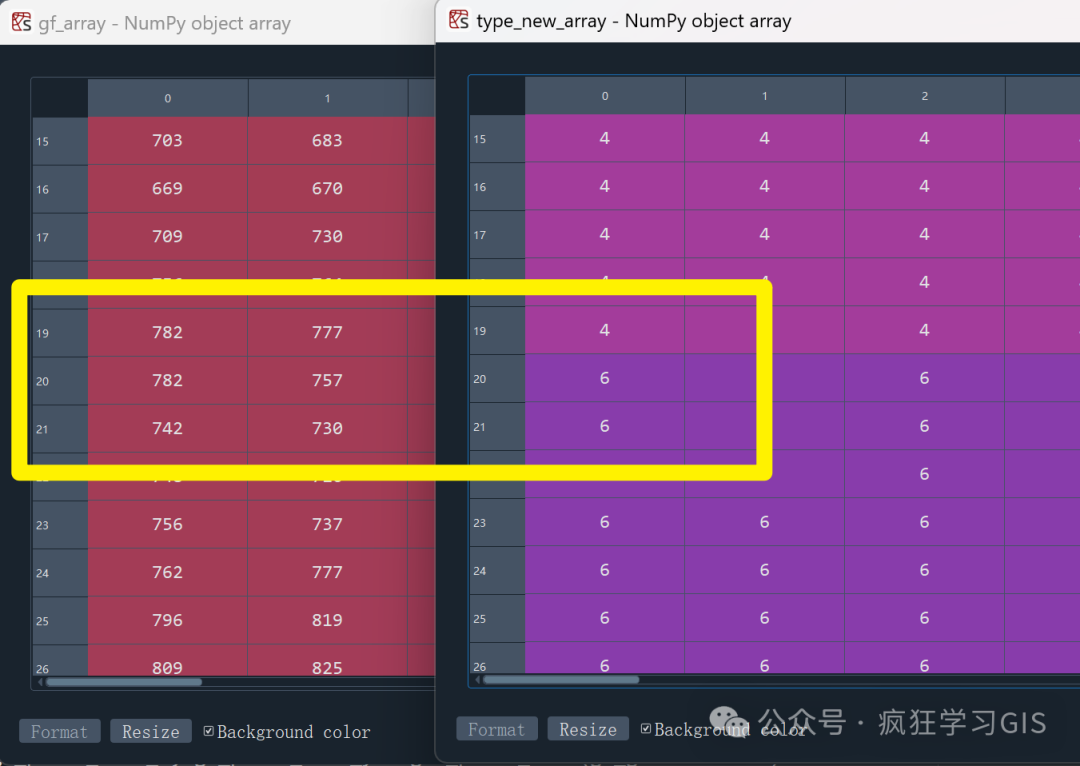
??执行上述代码后,我们来检查一下代码的运行是否符合预期。因为大遥感影像的空间分辨率低一些,所以我们就用它来验证我们的结果(空间分辨率低一些的话,验证起来反而更方便)。首先,如下图所示,可以看到,我们的代码结果(也就是type_new_array这个数组)显示,当行号为19与20时,其像素值发生了变化。
??我们到ArcGIS中验证一下,将小遥感影像从左上角开始,向下数20行,可以看到对应的像元(如下图中左下角的紫色框内所示)确实位于大遥感影像像元的分界处,且二者的像素值也都和上图中2个二维数组所示的一致。
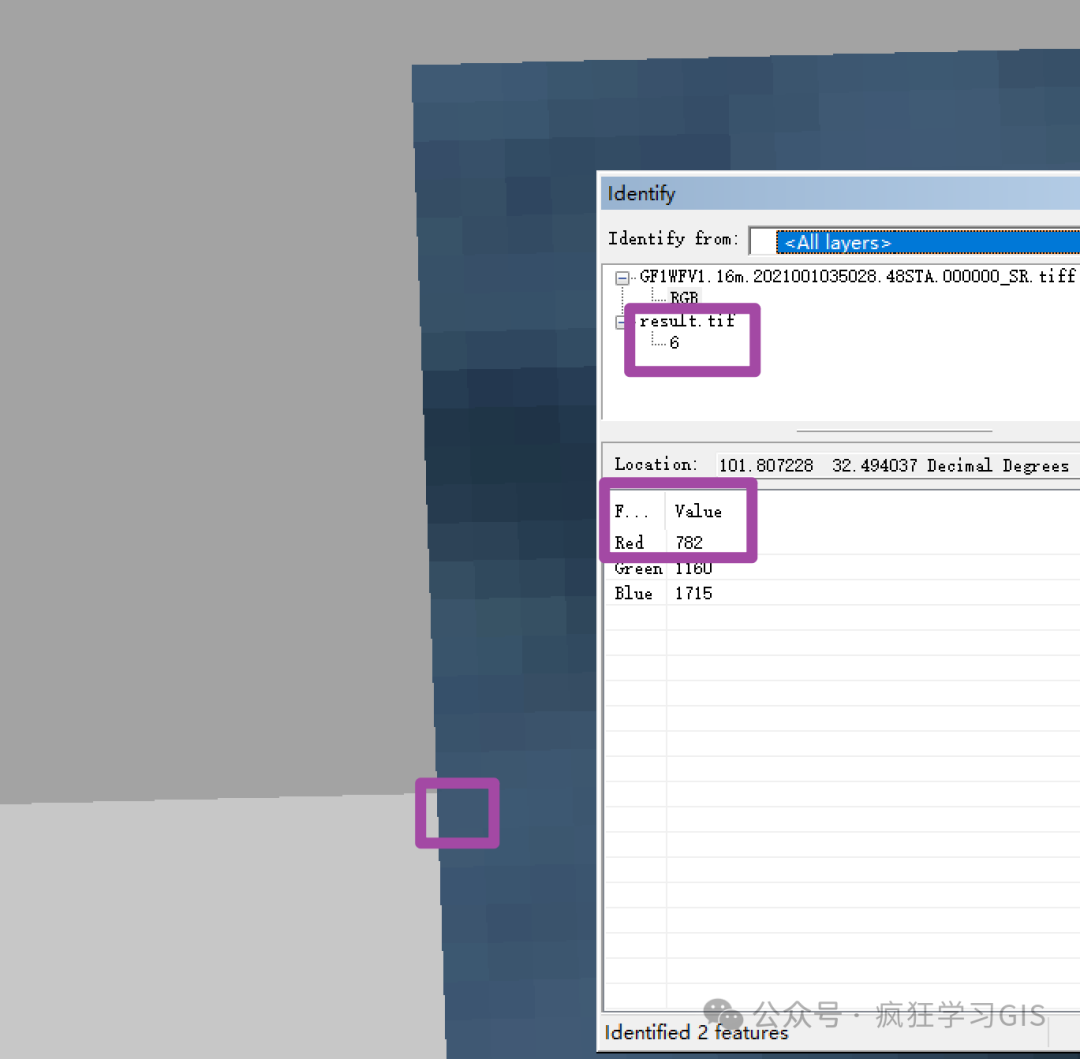
??至此,大功告成。