

�����ͼ��ѧ��,��ά�ռ����Ʋ�ͬ���������ת��������(����ϵ��ʱ��):
��X����ת:
R
x
=
[
?
1
0
0
?
0
c
o
s
��
?
sin
?
��
?
0
s
i
n
��
cos
?
��
]
(1)
R_x = \left[ \begin{matrix} \ 1 & 0 & 0 \\ \ 0 &cos \theta & -\sin \theta \\ \ 0 &sin \theta& \cos \theta \end{matrix} \right] \tag{1}
Rx?=????1?0?0?0cos��sin��?0?sin��cos��????(1)
��Y����ת: R y = [ cos ? �� 0 sin ? �� ? 0 1 0 ? sin ? �� 0 cos ? �� ] (2) R_y= \left[ \begin{matrix} \cos \theta & 0 & \sin \theta \\ \ 0 & 1 & 0 \\ -\sin \theta & 0 & \cos \theta \end{matrix} \right] \tag{2} Ry?=???cos��?0?sin��?010?sin��0cos��????(2)
��Z����ת: R z = [ ? c o s �� ? sin ? �� 0 ? s i n �� cos ? �� 0 0 0 1 ] (3) R_z = \left[ \begin{matrix} \ cos \theta & -\sin \theta & 0 \\ \ sin \theta& \cos \theta & 0 \\ 0 & 0 & 1 \end{matrix} \right] \tag{3} Rz?=????cos��?sin��0??sin��cos��0?001????(3)
���Կ���,��������ת����,ֻ������ά�ռ�������Χ��ijһ�ض���������ת����������²���ʹ�á��Ӽ��νǶ�����,��ά�ռ�������һ����ת(��������),�����Էֽ�Ϊ��X��,Y��,Z����ת�ĸ��ϡ�������������ת��
n
?
\vec{n}
n,��ת��
��
\theta
��:
R
(
n
?
,
��
)
=
R
(
x
?
,
��
x
)
?
R
(
y
?
,
��
y
)
?
R
(
z
?
,
��
z
)
?
.
(4)
R(\vec{n},\theta) = R(\vec{x},\theta x) * R(\vec{y},\theta y) * R(\vec{z},\theta z)\,.\tag{4}
R(n,��)=R(x,��x)?R(y?,��y)?R(z,��z).(4)
Ȼ��,�����ֽ����������ļ�������Ȼ��ʮ�ִ�ġ�
�����˹��ת��ʽ,���ڱ�ʾ�ռ�����һ����
v
?
\vec{v}
v,����һ��ת��
k
?
\vec{k}
k, ��ת��һ�Ƕ�
��
\theta
����,�õ��Ľ��:
v
?
r
o
t
=
v
?
cos
?
��
+
(
1
?
cos
?
��
)
(
k
?
?
?
v
?
)
?
k
?
+
sin
?
��
?
k
?
��
v
?
(5)
\vec{v}_{rot} = \vec{v} \cos\theta + (1-\cos\theta)(\vec{k} \cdot\ \vec{v})\cdot \vec{k} + \sin\theta *\vec{k} \times \vec{v} \tag{5}
vrot?=vcos��+(1?cos��)(k??v)?k+sin��?k��v(5)
���ʽ�ӻ����Ǻ�ֱ��,������Ҫ��������������ʽ�����Ƶ���������:
???????
~~~~~~~
???????����
a
?
��
b
?
\vec{a} \times \vec{b}
a��b ,��:
(
x
a
y
a
z
a
)
��
(
x
b
y
b
z
b
)
=
(
y
a
z
b
?
z
a
y
b
z
a
x
b
?
x
a
z
b
x
a
y
b
?
y
a
x
b
)
(6)
\begin{pmatrix} x_a \\y_a \\ z_a \end{pmatrix} \times \begin{pmatrix} x_b \\y_b \\ z_b \end{pmatrix}= \begin{pmatrix} y_az_b - z_ay_b \\z_ax_b - x_az_b \\ x_ay_b -y_ax_b \end{pmatrix}\tag{6}
???xa?ya?za?????��???xb?yb?zb?????=???ya?zb??za?yb?za?xb??xa?zb?xa?yb??ya?xb?????(6)
???????
~~~~~~~
???????����д�ɾ�����ʽ:
(
y
a
z
b
?
z
a
y
b
z
a
x
b
?
x
a
z
b
x
a
y
b
?
y
a
x
b
)
=
(
0
?
z
a
y
a
z
a
0
?
x
a
?
y
a
x
a
0
)
?
(
x
b
y
b
z
b
)
(7)
\begin{pmatrix} y_az_b - z_ay_b \\z_ax_b - x_az_b \\ x_ay_b -y_ax_b \end{pmatrix} = \begin{pmatrix} 0&-z_a & y_a \\z_a &0&-x_a \\ -y_a &x_a &0 \end{pmatrix} \cdot \begin{pmatrix} x_b \\y_b \\ z_b \end{pmatrix}\tag{7}
???ya?zb??za?yb?za?xb??xa?zb?xa?yb??ya?xb?????=???0za??ya???za?0xa??ya??xa?0????????xb?yb?zb?????(7)
???????
~~~~~~~
???????��ɼ�
a
?
\vec{a}
a �� " ������� " Ϊ:
R
a
?
=
(
0
?
z
a
y
a
z
a
0
?
x
a
?
y
a
x
a
0
)
(8)
R_{\vec{a}} = \begin{pmatrix} 0&-z_a & y_a \\z_a &0&-x_a \\ -y_a &x_a &0 \end{pmatrix} \tag{8}
Ra?=???0za??ya???za?0xa??ya??xa?0????(8)
???????
~~~~~~~
???????������������
b
?
\vec{b}
b , �� :
a
?
��
b
?
=
R
a
?
?
b
?
(9)
\vec{a} \times \vec{b} = R_{\vec{a}} \cdot \vec{b}\tag{9}
a��b=Ra??b(9)
???????
~~~~~~~
???????������������
a
?
?
b
?
?
c
?
\vec{a} ~\vec{b} ~\vec{c}
a?b?c ,���������ػ�����Ϊ:
a
?
��
(
b
?
��
c
?
)
\vec{a} \times (\vec{b} \times \vec{c})
a��(b��c)
???????
~~~~~~~
???????ֵ��ע�����,һ����˵ :
a
?
��
(
b
?
��
c
?
)
��
(
a
?
��
b
?
)
��
c
?
\vec{a} \times (\vec{b} \times \vec{c}) \neq(\vec{a} \times \vec{b}) \times \vec{c}
a��(b��c)��?=(a��b)��c
???????
~~~~~~~
???????���º��ʽ,�������ػ�չ�����������չ�ʽ,������������
a
?
��
b
?
��
c
?
\vec{a}��\vec{b}��\vec{c}
a��b��c ������ :
a ? �� ( b ? �� c ? ) = ( a ? ? c ? ) ? b ? ? ( a ? ? b ? ) ? c ? (10) \vec{a} \times (\vec{b} \times \vec{c}) = (\vec{a} \cdot \vec{c}) ~\vec{b} -(\vec{a} \cdot \vec{b}) ~\vec{c}\tag{10} a��(b��c)=(a?c)?b?(a?b)?c(10)
???????
~~~~~~~
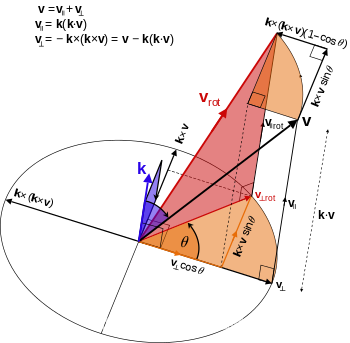
???????����ͼ��ʾ,������һ���ռ��е�����
v
?
\vec{v}
v,����ת��
k
?
\vec{k}
k(��λ����), ��ʱ����ת��
��
\theta
���Ƕȵ�
v
?
r
o
t
\vec{v}_{rot}
vrot?�ļ��ι�ϵ��
???????
~~~~~~~
???????��
v
?
��
k
?
\vec{v} �� \vec{k}
v��k��ɵ�ƽ����,
v
?
\vec{v}
v���Էֽ�Ϊ:��
k
?
\vec{k}
k��ֱ�ķ���
v
��
?
\vec{v_{\perp}}
v��??����
k
?
\vec{k}
kƽ�еķ���
v
��
?
\vec{v_{\parallel}}
v��??,��:
v
?
=
v
��
?
+
v
��
?
??
v
?
r
o
t
=
v
?
r
o
t
��
+
v
?
r
o
t
��
(11)
\vec{v} = \vec{v_{\parallel}} + \vec{v_{\perp}} \tag{11} ~~ \vec{v}_{rot} = \vec{v}_{rot\parallel} + \vec{v}_{rot\perp}
v=v��??+v��????vrot?=vrot��?+vrot��?(11)
???????
~~~~~~~
???????����,��:
v
��
?
=
(
v
?
?
k
?
)
?
k
?
(12)
\vec{v_{\parallel}} = (\vec{v} \cdot \vec{k}) * \vec{k}\tag{12}
v��??=(v?k)?k(12)
???????
~~~~~~~
???????��,��(11)ʽ:
v
��
?
=
v
?
?
v
��
?
=
v
?
?
(
v
?
?
k
?
)
?
k
?
(13)
\vec{v_{\perp}} = \vec{v} - \vec{v_{\parallel}} = \vec{v} - (\vec{v} \cdot \vec{k}) * \vec{k}\tag{13}
v��??=v?v��??=v?(v?k)?k(13)
???????
~~~~~~~
???????�� (10)ʽ�������չ�ʽ:
v
?
?
(
v
?
?
k
?
)
?
k
?
=
(
k
?
?
k
?
)
?
v
?
?
(
k
?
?
v
?
)
?
k
?
=
k
?
��
(
v
?
��
k
)
?
(14)
\vec{v} - (\vec{v} \cdot \vec{k}) * \vec{k} = (\vec{k} \cdot \vec{k}) *\vec{v} - (\vec{k} \cdot \vec{v}) * \vec{k} = \vec{k} \times(\vec{v}\times \vec{k)}\tag{14}
v?(v?k)?k=(k?k)?v?(k?v)?k=k��(v��k)?(14)
???????
~~~~~~~
???????��:
v
��
?
=
k
?
��
(
v
?
��
k
)
?
=
?
k
?
��
(
k
?
��
v
)
?
(15)
\vec{v_{\perp}} = \vec{k} \times(\vec{v}\times \vec{k)} = -\vec{k} \times(\vec{k}\times \vec{v)}\tag{15}
v��??=k��(v��k)?=?k��(k��v)?(15)
???????
~~~~~~~
???????���ݼ��ι�ϵ,ƽ������ת��ķ�������תʱ����ı�����Ⱥͷ���,�����:
v
?
r
o
t
��
=
v
?
��
(16)
\vec{v}_{rot\parallel} = \vec{v}_{\parallel} \tag{16}
vrot��?=v��?(16)
???????
~~~~~~~
???????����ת��Ĵ�ֱ����,��ͼ�еļ��ι�ϵ�ɵ�
v
?
r
o
t
��
\vec{v}_{rot\perp}
vrot��?���Էֽ�Ϊ
k
?
��
v
?
\vec{k} \times \vec{v}
k��v��
v
?
��
\vec{v}_{\perp}
v��?�����������������,��
v
?
r
o
t
��
=
v
?
r
o
t
��
?
k
?
��
v
?
�O
k
?
��
v
?
�O
+
v
?
r
o
t
��
?
v
?
��
�O
v
?
��
�O
=
sin
?
��
?
(
k
?
��
v
?
)
+
cos
?
��
?
v
?
��
(17)
\begin{aligned} \vec{v}_{rot\perp} = \vec{v}_{rot\perp} \cdot \frac{\vec{k} \times \vec{v}}{ \vert \vec{k} \times \vec{v} \vert}+ \vec{v}_{rot\perp} \cdot \frac{\vec{v}_{\perp}}{\vert\vec{v}_{\perp\vert}} = \sin\theta * (\vec{k} \times \vec{v}) + \cos\theta * \vec{v}_{\perp} \tag{17} \end{aligned}
vrot��?=vrot��??�Ok��v�Ok��v?+vrot��??�Ov���O?v��??=sin��?(k��v)+cos��?v��??(17)
???????
~~~~~~~
???????��(12)(16)(17)ʽ����,��:
v
?
r
o
t
=
v
?
��
+
cos
?
��
?
(
v
?
?
v
?
��
)
+
sin
?
��
?
(
k
?
��
v
?
)
=
cos
?
��
v
?
+
(
1
?
cos
?
��
)
v
?
��
+
sin
?
��
(
k
?
��
v
?
)
=
v
?
cos
?
��
+
(
1
?
cos
?
��
)
(
k
?
?
?
v
?
)
?
k
?
+
sin
?
��
?
k
?
��
v
?
=
ʽ
5
\begin{aligned} \vec{v}_{rot}&= \vec{v}_{\parallel} + \cos\theta * (\vec{v} - \vec{v}_{\parallel}) + \sin\theta * (\vec{k} \times \vec{v})\\&=\cos\theta\vec{v} + (1 - \cos\theta)\vec{v}_\parallel + \sin\theta(\vec{k} \times \vec{v})\\&=\vec{v} \cos\theta + (1-\cos\theta)(\vec{k} \cdot\ \vec{v})\cdot \vec{k} + \sin\theta *\vec{k} \times \vec{v}&=ʽ5 \end{aligned}
vrot??=v��?+cos��?(v?v��?)+sin��?(k��v)=cos��v+(1?cos��)v��?+sin��(k��v)=vcos��+(1?cos��)(k??v)?k+sin��?k��v?=ʽ5?
???????
~~~~~~~
???????��ʽ���ɼ�������,��ɾ�����ʽ:
v
?
r
o
t
=
v
?
cos
?
��
+
(
1
?
cos
?
��
)
(
k
?
?
?
v
?
)
?
k
?
+
sin
?
��
?
k
?
��
v
?
=
v
?
?
v
?
+
v
?
cos
?
��
+
(
1
?
cos
?
��
)
(
k
?
?
?
v
?
)
?
k
?
+
sin
?
��
?
k
?
��
v
?
=
v
?
?
(
1
?
cos
?
��
)
v
?
+
(
1
?
cos
?
��
)
(
k
?
?
?
v
?
)
?
k
?
+
sin
?
��
?
k
?
��
v
?
=
v
?
+
(
1
?
cos
?
��
)
(
(
k
?
?
v
?
)
k
?
?
(
k
?
?
k
?
)
v
?
)
+
sin
?
��
?
k
?
��
v
?
=
v
?
+
sin
?
��
k
?
��
v
?
+
(
1
?
cos
?
��
)
k
?
��
(
k
?
��
v
?
)
\begin{aligned} \vec{v}_{rot} &= \vec{v} \cos\theta + (1-\cos\theta)(\vec{k} \cdot\ \vec{v})\cdot \vec{k} + \sin\theta *\vec{k} \times \vec{v} \\&= \vec{v} - \vec{v} + \vec{v} \cos\theta + (1-\cos\theta)(\vec{k} \cdot\ \vec{v})\cdot \vec{k} + \sin\theta *\vec{k} \times \vec{v} \\&= \vec{v} - (1-\cos\theta)\vec{v} +(1-\cos\theta)(\vec{k} \cdot\ \vec{v})\cdot \vec{k} + \sin\theta *\vec{k} \times \vec{v}\\&=\vec{v} + (1-\cos\theta)((\vec{k}\cdot\vec{v})\vec{k} - (\vec{k}\cdot\vec{k})\vec{v}) + \sin\theta *\vec{k} \times \vec{v} \\&=\vec{v}+\sin\theta\vec{k}\times\vec{v}+ (1-\cos\theta)\vec{k}\times(\vec{k}\times\vec{v}) \end{aligned}
vrot??=vcos��+(1?cos��)(k??v)?k+sin��?k��v=v?v+vcos��+(1?cos��)(k??v)?k+sin��?k��v=v?(1?cos��)v+(1?cos��)(k??v)?k+sin��?k��v=v+(1?cos��)((k?v)k?(k?k)v)+sin��?k��v=v+sin��k��v+(1?cos��)k��(k��v)?
???????
~~~~~~~
???????��
k
?
\vec{k}
k�IJ������Ϊ
R
k
?
R_{\vec{k}}
Rk?,��:
v
?
r
o
t
=
v
?
+
sin
?
��
R
k
?
?
v
?
+
(
1
?
cos
?
��
)
R
k
?
?
R
k
?
?
v
?
=
(
I
+
sin
?
��
R
k
?
+
(
1
?
cos
?
��
)
R
k
?
2
)
?
v
?
=
M
v
?
\begin{aligned} \vec{v}_{rot} &= \vec{v} + \sin\theta R_{\vec{k}} * \vec{v} + (1-\cos\theta) R_{\vec{k}} *R_{\vec{k}} * \vec{v} \\&=(I + \sin\theta R_{\vec{k}} + (1-\cos\theta) R_{\vec{k}}^2) * \vec{v}\\&=M\vec{v} \end{aligned}
vrot??=v+sin��Rk??v+(1?cos��)Rk??Rk??v=(I+sin��Rk?+(1?cos��)Rk2?)?v=Mv?
???????
~~~~~~~
???????����:
M
=
I
+
sin
?
��
R
k
?
+
(
1
?
cos
?
��
)
R
k
?
2
M = I + \sin\theta R_{\vec{k}} + (1-\cos\theta) R_{\vec{k}}^2
M=I+sin��Rk?+(1?cos��)Rk2?
???????
~~~~~~~
???????Ϊ��ά�ռ���������������
k
?
\vec{k}
k��ʱ����ת
��
\theta
���Ƕȵ���ת����

���ļٶ����dos�µIJ�����386PM��һ�����˽⡣ 1����Ⱦ�κ�һ����������Ҫ�м�...
ǰ�ԣ����Navicat����Oracle���ݿⱨ��Cannot load OCI DLL���⣬��Navicat�ɹ�...
�����ļ����û����Ϣ��ǩ�����Ľ�ͨ����ͬ�ķ�����Windows 10���ҵ�����Ϣ�� ...
���ƴ��� ��������: var editor = FCKeditorAPI.GetInstance("content"); editor...
����ģʽƥ�� һ�д�������Ŀ�ʼ��ģʽ�����������ʽ�������Ԫ�أ�������һ��...
��Ҫ���� Safari���� swift/OC��JS���� ���Ӽ��ؽ����� ֧��JS��alert��confirm...
������ѡ��ѡ��ť��ʹ�� ���ƴ��� ��������: !DOCTYPE html PUBLIC "-//W3C/...
����ʵ��Ϊ��ҷ�����jsʵ�ֻ�����������ľ�����룬����Ҳο��������������� ...
���Ϲ����ⷽ��������кܶ࣬�ظ��Ķ������IJ����������ṩ˼·��������һЩ...
�ġ�XMLӦ�÷��� �ܵ�˵����XML��Ӧ�ÿɷ�Ϊ���ࣺ ��1��Ӧ���ڿͻ���Ҫ�벻ͬ��...

