


《《《《《正文》》》》》
?
?
《前言》
基于UART的串口在实际项目中的应用相当广泛,包括wifi、can、lin等均可使用uart进行通信,方便且成本低;而uart串口功能不仅仅体现在产品使用功能上,在开发调试阶段更是一个必不可少的调试助手。今天就来构建一个基于uart的调试串口功能模块;
?
开发需求:使用stm32f103的usart模块开发一个具有发送任意字符串的调试串口功能的模块;
?
相关代码获取地址:
https://pan.baidu.com/s/1zyrOF18WxIq0H3_4qU7Evg
关注公众号,发送1234,获取提取码;
?
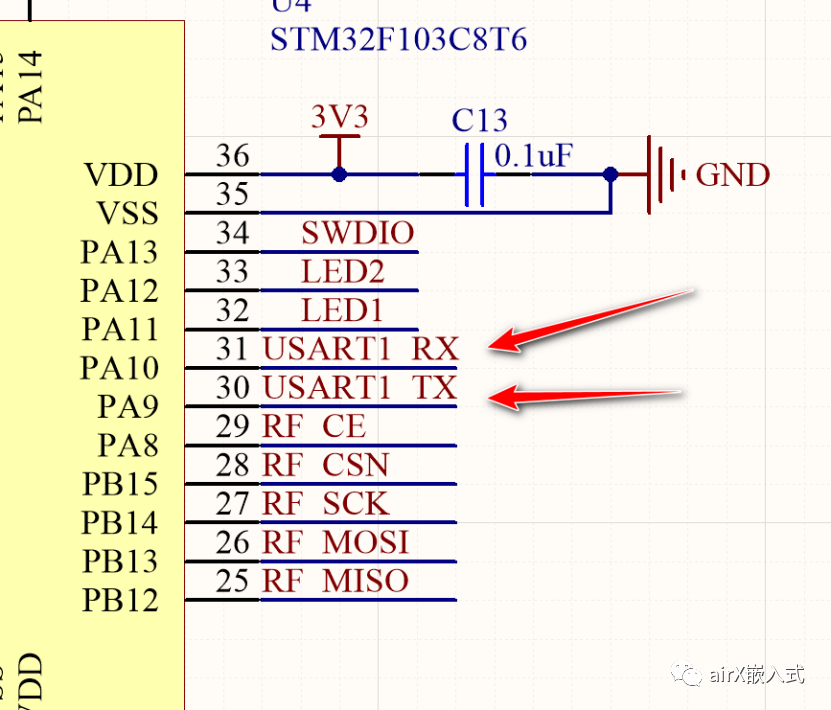
《硬件设计》
| TX | PA9 |
| RX | PA10 |
?
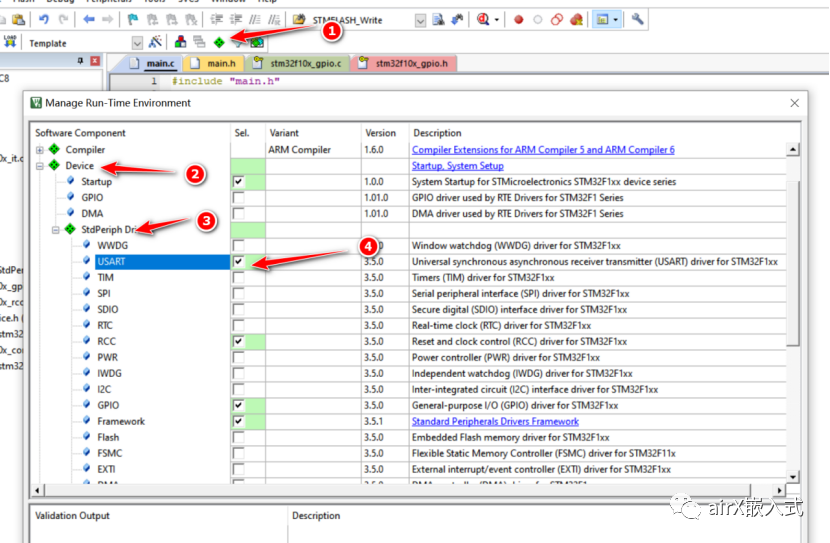
《加载USART库文件》

?

?
《软件设计》
第一步:中断等级配置函数
void NvicConfig(void){NVIC_InitTypeDef NVIC_InitStruct;?NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);?NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn; //USART中断通道NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=2; //设置抢占优先级为0NVIC_InitStruct.NVIC_IRQChannelSubPriority=1; //设置子优先级为1NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE; //使能外USART中断通道??NVIC_Init(&NVIC_InitStruct);???????????????????????????//中断优先级初始化函数}
?
第二步:串口初始化函数
//传入参数为波特率void USART_init(uint32_t baudrate){GPIO_InitTypeDef GPIO_InitStruct; //定义GPIO结构体变量USART_InitTypeDef USART_InitStruct; //定义串口结构体变量?RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOA、USART1的时钟?GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引脚GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9为复用推挽输出GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数?GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引脚GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10为浮空输入GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函数?USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //发送接收模式USART_InitStruct.USART_Parity=USART_Parity_No; //无奇偶校验USART_InitStruct.USART_BaudRate=baudrate; //波特率USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字长8位USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //无硬件数据流控制USART_Init(USART1,&USART_InitStruct); //串口初始化函数?USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //串口接收中断USART_ITConfig(USART1,USART_IT_IDLE,ENABLE); //串口空闲中断?USART_Cmd(USART1,ENABLE); //使能USART1}
?
第三步:中断处理函数
void USART1_IRQHandler(void){uint8_t clear = clear; //定义这个变量是针对编译出现“没有用到这个变量”的警告提示uint8_t res;?if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断{res = USART1->DR;????????//在此做数据接收处理}else if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) //空闲中断{clear = USART1->SR; //读SR寄存器??????clear?=?USART1->DR;?//读DR寄存器(先读SR,再度DR,就是为了清除IDIE中断)}USART_ClearITPendingBit(USART1,USART_IT_RXNE);}
?
第四步:写发送数据函数
void usart_send(uint8_t *data,uint8_t len){uint8_t i;?for(i=0;i<len;i++){USART_SendData(USART1,*(data+i));while(USART_GetFlagStatus(USART1,USART_FLAG_TC) == RESET);}}
?
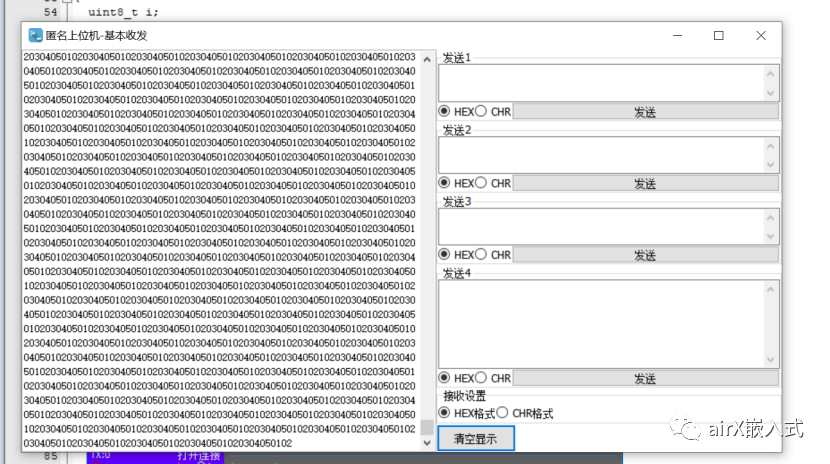
第五步:来个简单的测试,主函数:
int main(void){uint8_t usartSendbuf[5] = {1,2,3,4,5};NvicConfig();USART_init(115200);?for(;;){usart_send(usartSendbuf,5);}}
?
结果:
?
《printf函数重定向》
重定向函数:
int fputc(int ch,FILE *f) //printf重定向函数{USART_SendData(USART1,(uint8_t)ch); //发送一字节数据while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待发送完成return ch;}
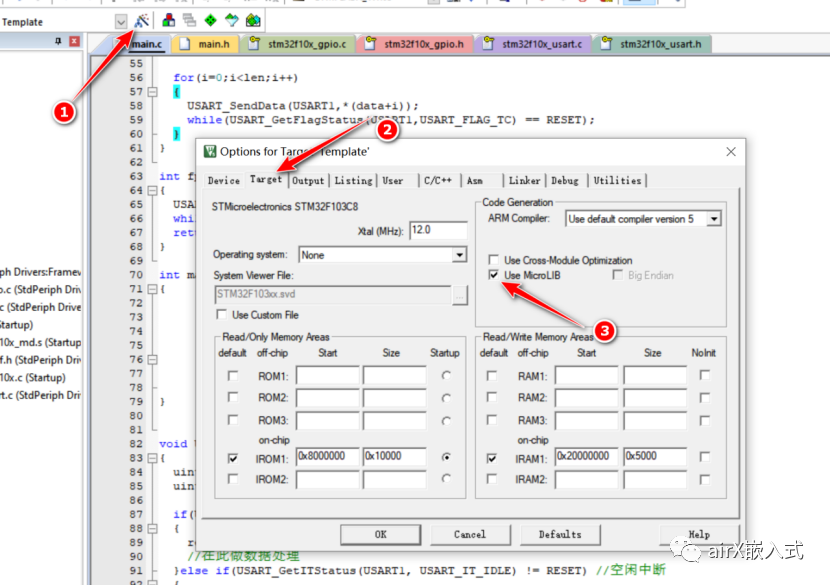
我们这里直接写是不行,因为这是C库自带的东西,但是可以重定向到这个函数(printf()在c标准库函数实质是一个宏,实际是调用fputc()函数),fputc()函数默认是把字符输出到调试器控制窗口,所以要想把数据通过USART输出到串口助手,需对基于fputc()的printf()系列函数的输出重定向到USART端口上去。
这里特别注意:打开“Options for target...”->“target”勾选“Use MiclroLIB” 不然用printf会有问题;
?
最后上测试函数:
int main(void){NvicConfig();USART_init(115200);?for(;;){printf("System Init Finish\n");printf("我正在测试\n");}}
结果:

?
?
《《《《《END》》》》》

歌词编辑器 歌词编辑器 第一步:选择要播放的歌曲并播放 第二步:填写全部的歌词...
【排序算法】之lowb三人组冒泡、插入、选择 什么是lowb三人组 冒泡排序bubble so...
vbs:把一段文字中指定字符颜色变成红色的正则 functionc(Tstr,Word) Dimre Setre...
一石激起千层浪,继中国区浩浩荡荡的大裁员告一段落之后,甲骨文并未因此收起手...
前言 相信大家都知道在IDE中代码的智能提示几乎都是标配,虽然一些文本编辑器也...
计算属性computed: 支持缓存,只有依赖数据发生改变,才会重新进行计算 不支持...
一、正则表达式概述 二、正则表达式在VBScript中的应用 三、正则表达式在VavaScr...
微信文件传输助手是微信电脑版与手机微信之间相互传输图片等文件的好工具,但很...
ADO对象: Connection Command Recordset Record Stream ASP支持的对象很多,可...
本文将研究 ES6 的 for ... of 循环。 旧方法 在过去,有两种方法可以遍历 javas...

