HPSO-ACO算法:仓库巡检机器人路径优化方法
HPSO-ACO算法:仓库巡检机器人路径优化方法

作者:Jianxian Liu,Hongyuan Liu
编辑:东岸因为@一点人工一点智能
论文地址:https://www.tandfonline.com/doi/full/10.1080/08839514.2023.2254048
随着智能化的日益普及,许多企业的仓库检查工作都是通过机器人完成。但是,由于仓库检查存在多个目标点,智能机器人检查路径规划的低效率则成了亟需解决的问题。
为了解决这个问题,本文提出了一种基于混合粒子群算法(HPSO)的HPSO-ACO算法,对蚁群算法(ACO)的参数进行了优化,并建立了仓库管理中巡检机器人的路径优化模型。
实验结果表明,在相同条件下,与HPSO算法和ACO算法相比,所提出的方法具有更快的收敛速度、更少的迭代次数和更短的最优路径,为巡检机器人的路径优化提供了理论参考。

简介
随着物流业的快速发展,对标准化仓库管理的需求越来越大。随着智能化的日益普及,许多企业综合利用物联网和人工智能技术实现对巡检机的控制,使用仓库巡检机器人进行日常巡检工作。巡检的路径规划是机器人自动导航中的一个关键问题,目的是在多目标条件下为机器人选择最短、最高效的移动过程。然而,由于缺乏高效的路径规划算法作为技术支撑,传统的巡检机器人在路径自动规划中存在计算能力弱、资源消耗高等问题。巡检机器人的多目标路径规划本质上是一个旅行商问题,因此使用启发式算法来解决这个问题已经成为一个重要的研究方向。
针对上述问题,Dugulana,M.等人将Q-Learning与神经网络算法相结合,实现了移动机器人在不确定工作空间中的无碰撞轨迹规划。Xiong,N.Z.等人提出了一种时间禁忌ACO算法,改善了动态环境下ACO路径规划的收敛速度慢、全局搜索能力差的问题。Huang,M.D.等人提出了一种结合角度因子和可见性的机器人路径规划方法;实验结果表明,该算法在全局路径规划方面优于遗传算法和传统蚁群算法。Porta,G.M.等人提出了一种基于简单ACO的新方案。实验结果表明,该方法有效地提高了路径规划的速度。Xuan,R.Z.等人提出了一种利用蚁群算法优化A?*?算法的机器人路径规划方法,实验结果表明该方法的搜索路径优于A?*?算法)。
通过文献调查发现,优化算法在机器人路径规划中有着广泛的应用,可以为机器人提供最优的路径规划。几种常见优化算法的比较如表1所示。禁忌搜索优化(TSO)和模拟退火(SA)算法是单体优化算法,它们在解域(the solution domain)中的搜索空间较小,求解效率较低。蚁群算法(Ant Colony Optimization,ACO)是一种算法结构,而混合粒子群优化(Hybrid Particle Swarm Optimization,HPSO)是基于群体协作的随机搜索算法。HPSO和ACO的特点是群体优化算法,它们可以以单个单位的形式接收次优解,即跳出局部最优解;因此,它们在解决检查机器人的路径规划问题中应用更为广泛。

图1 几种常见优化算法对比
Ming,L.Y.等人提出了一种基于自适应ACO和HPSO的融合模型,实现了智能机器人在扰动环境中的路径规划。Wei,P.C.等人提出了一种基于HPSO算法和ACO算法的网格调度优化算法,有效地提高了任务调度的效率。Kuo,R.J.等人提出了一种新的将ACO和HPSO相结合的HPSO,有效地解决了车间调度问题。Wu,C.Z.等人引入了一种改进的ACO来代替道路因素,有效地降低了9.73%~13.63%的平均城市道路拥堵率。
现有文献更多地关注解决实际问题,但在机器人路径自动规划过程中,算力和资源消耗问题尤为重要,却很少受到关注。同时,通过文献调查发现,HPSO算法和ACO算法的结合可以提高算法的整体性能。因此,本文提出了一种基于HPSO的巡检机器人路径规划方法来优化ACO,以解决传统巡检机器人路径规划能力较弱的问题。在该方法中,使用HPSO来优化ACO的参数。同时,对信息点更新方法进行了改进,提高了蚁群算法的收敛迭代速度和局部搜索能力。
本文的贡献如下:
· 将HPSO和ACO相结合,建立了HPSO-ACO算法,提高了HPSO算法和ACO算法的优化能力。
· 基于HPSO-ACO算法,建立了智能仓库巡检机器人路径优化模型,实现了多目标条件下巡检机器人的路径优化。
文章其余部分的结构如下。第二章建立了相关模型,介绍了基于HPSO的改进ACO。第三章对上述模型和算法进行了比较仿真分析,最后提出了结论和讨论。

模型建立
2.1 ACO
ACO的原理结构如图1所示。根据气味轨迹不断优化路径,直到找到最佳路径。
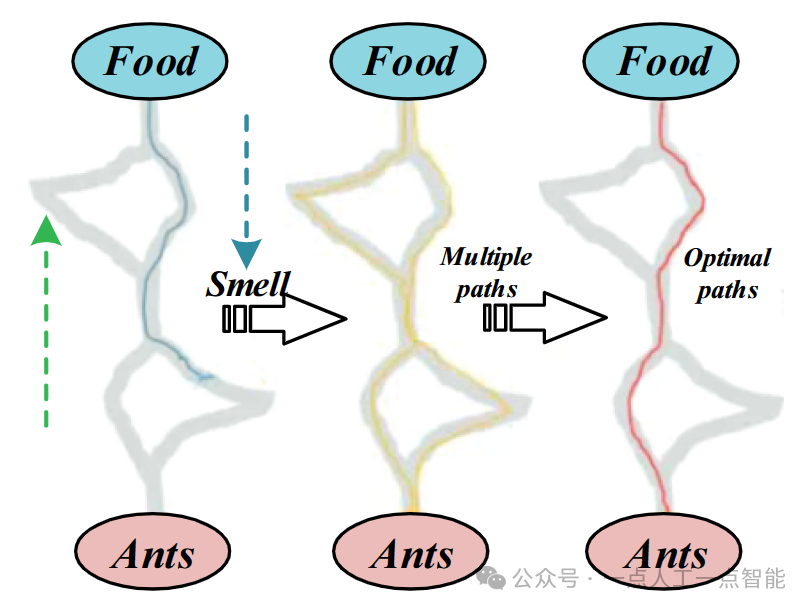
图1 ACO原理架构

是指ant(机器人) k当前处于第

个巡逻点时选择移动到第

个巡逻点的概率,公式如下:

2.2 HPSO
粒子群优化(PSO)是一种群智能算法,它将优化问题的解抽象为没有质量和体积的粒子,每个粒子都表现出三个特征值:位置、速度和适应度函数值。设粒子数为N,在D维搜索空间中,粒子
的位置为

,速度为

。这受粒子本身的最佳位置和全局最佳位置的控制,并不断更新,直到找到最佳解。更新粒子位置和速度的方法,如

在优化过程中,传统的粒子群优化算法可能会收敛到局部最优解,导致计算误差较大。借鉴遗传算法中混合(hybridization)的概念,在每次迭代中,根据混合的概率,将指定数量的粒子放入混合池中,并将池中的粒子相互交叉混合,生成相同数量的子粒子,这些子粒子取代了父粒子,如图2所示。
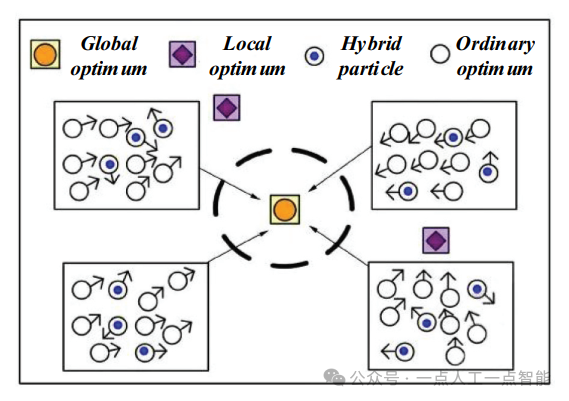
图2 HPSO原理架构
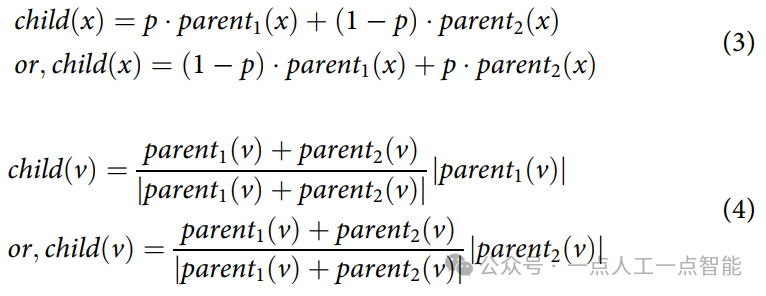
子位置

和子速度

更新如下:
当被困在不同局部最优中的两个粒子进行混合操作时,它们往往可以脱离局部最优。因此,引入混合算法可以提高种群的全局优化能力。
2.3 HPSO-ACO
ACO根据信息点浓度的变化求出最优路径。由于属于经典的概率算法,算法的初始参数是根据人们的经验随机给定的,导致算法的稳定性较差。相反,与ACO不同,HPSO具有快速跳出局部最优的能力,能够快速有效地优化ACO的参数。因此,本文使用HPSO对ACO的参数

进行优化,以解决智能巡检路径优化问题。
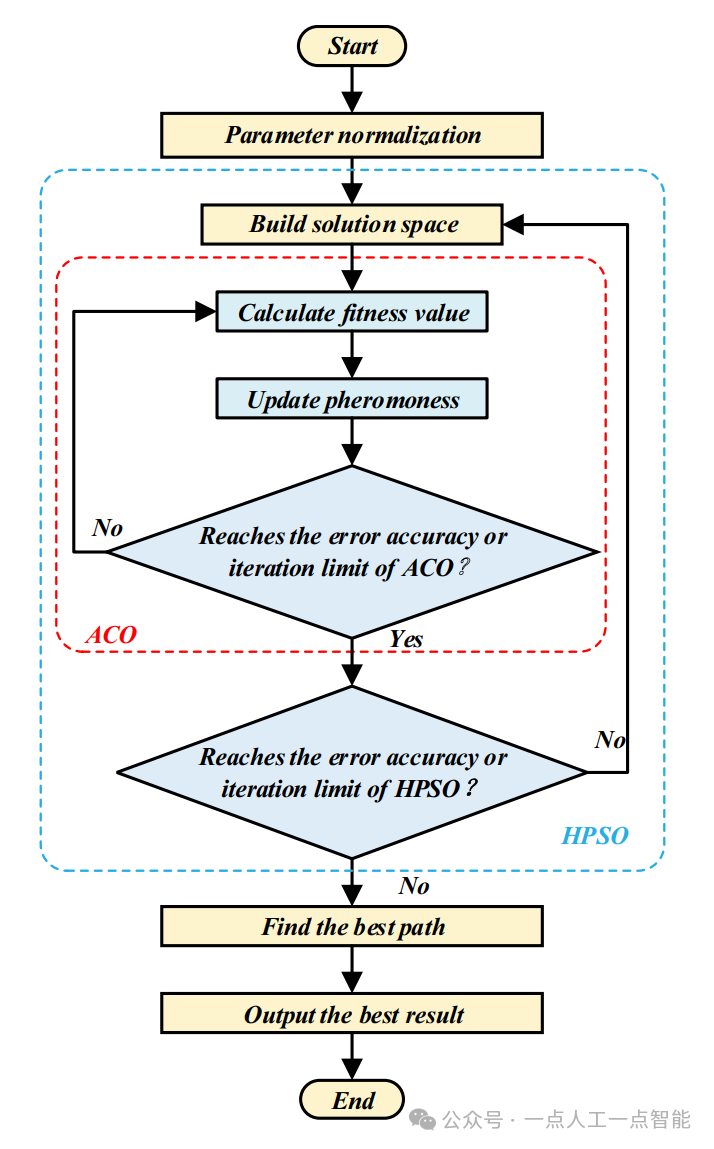
图3 HPSO-ACO解决方案流程图
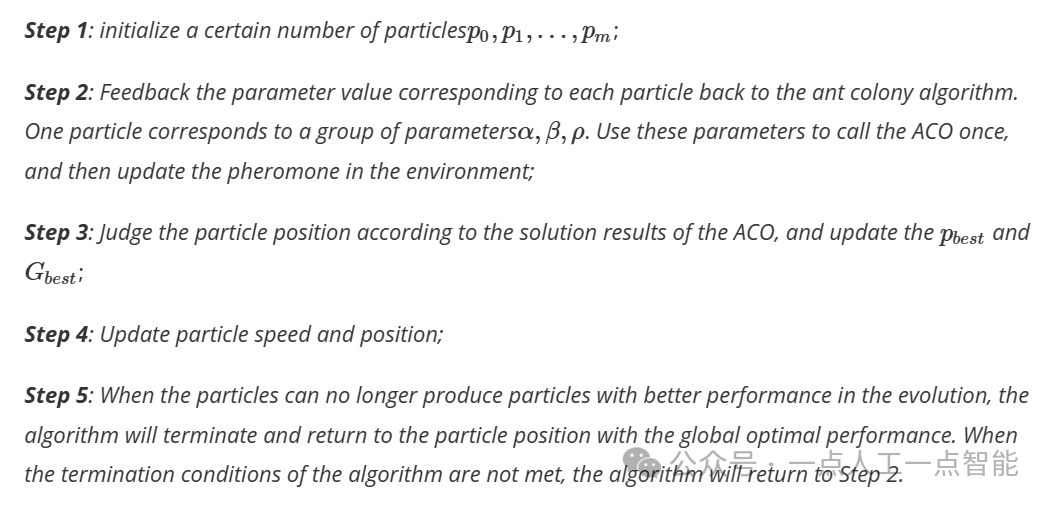
HPSO-ACO的流程如图3所示,具体步骤如下:
2.4 智能巡检机器人路径规划模型的建立
智能巡检机器人想要巡检仓库中的每个巡检点,每个巡检点只巡检一次,最后返回到初始巡检点,找到最短的巡检路径。数学模型如下:
如果访问

个巡检点的路径由

表示,

,
,则两个巡检点
和
之间的距离为:

巡检路径的总距离为:

方程(6)是针对本文中设计的算法要优化的模型。信息点更新方法的选择对ACO的解决方案质量有着非常重要的影响。以下是更新传统ACO信息点的公式:

本文的信息点更新公式:


表示“蚂蚁”在检查过程中的总距离,Q表示信息素含量。针对传统ACO无法在短时间内积累足够信息点的问题,信息点在整个算法求解过程中不断更新。当参数发生变化时,信息点不会重新初始化。这种方法可以在短时间内保留和积累足够的环境信息,大大减少ACO迭代次数,减少时间消耗。当没有最优解时,信息点更新公式如等式(7)和等式(8),所示。当出现更好的解决方案时,“蚂蚁”留下的信息点密度会提高,信息点会根据以下公式更新:

在等式(10)中,

是从等式(9)中获得的。

是蚂蚁在路径迭代求解过程中在最优路径

上留下的信息点密度,包括:

因此,步骤2可以改为:将每个初始粒子对应的参数值返回给ACO。一个粒子对应于一组参数

,使用这组参数来操作ACO。当参数发生变化时,信息点将不会重新初始化。

实验结果与分析
ACO、HPSO、HPSO-ACO三个模型的实验结果的性能比较如表2所示。HPSO在939次迭代后收敛,这大于ACO算法的55次迭代。然而,HPSO-ACO的迭代次数明显好于HPSO算法的939次迭代和ACO的55次迭代,表明HPSO-ACO节省了更多的计算资源。

表2 三种模型的实验结果对比
HPSO-ACO的计算时间比ACO算法和HPSO算法的计算时间短,表明HPSO-ACO的计算速度快于ACO算法或HPSO算法。
HPSO-ACO计算出的最优路径长度为120.58?m,比HPSO的最佳路径长度短36.75?m比ACO的最优路径长度短。可以解释为,HPSO-ACO算法的计算结果更接近全局最优解,优化效果更好。
通过分析可以看出,HPSO-ACO与ACO相比减少了2.21%的路径,与HPSO相比减少了6.91%的路径。总之,HPSO-ACO算法的性能优于HPSO和ACO算法。

结论与讨论
随着企业仓库管理对自动化的需求不断增加,许多检查任务都是通过机器人完成的。然而,由于仓库检查的目标点多,在路径自动规划中存在计算能力弱和资源消耗等问题。为了实现检测机器人的自动路径规划,提出了一种基于HPSO和ACO的路径优化方法。基于X企业仓库的映射模型,实验分析表明,与ACO和HPSO算法相比,HPSO-ACO算法在优化闭曲线检测路径方面节省了更多的计算资源,计算速度更快。这种方法不仅提高了机器人的检测效率,而且降低了检测成本。
ACO算法具有正反馈的特点,容易导致算法陷入局部最优,参数选择更依赖于经验和试错。初始参数不当会削弱算法的优化能力。HPSO算法的初始收敛速度相对较慢,但其内部混合机制不依赖于问题信息,可以很好地促进算法跳出局部最优。HPSO-ACO算法可以依靠HPSO的混合机制,使ACO算法更容易跳出局部最优,加快了算法的整体求解速度,提高了算法的优化能力。
本文的研究成果也存在一定的局限性。为了便于实验,对地图进行了简化,在实际的仓库环境中,不可避免地会出现各种障碍。在有障碍物的地图环境中,要实现机器人路径规划和自动避障,需要将其与其他新算法相结合,HPSO-ACO模型的适应性有待进一步研究。另一方面,该项目使用二维地图。如果实际的仓库地图是三维空间地图,则需要进一步的实验来证明HPSO-ACO模型的性能。
HPSO-ACO算法能够在现有基础上有效提高其全局优化能力,对解决旅行商问题具有一定的指导意义。同时,本研究的研究成果在城市道路规划、商品配送、无人机自动导航等方面也具有一定的推广价值。
更多详细信息,请参阅论文原文
https://www.tandfonline.com/doi/full/10.1080/08839514.2023.2254048