В·ѕ¶№ж»®Лг·Ё | A* ЛСЛчЛг·Ё
В·ѕ¶№ж»®Лг·Ё | A* ЛСЛчЛг·Ё

ЧчХЯЈєRachit Belwariar
ФОДЈєhttps://www.geeksforgeeks.org/a-search-algorithm/#
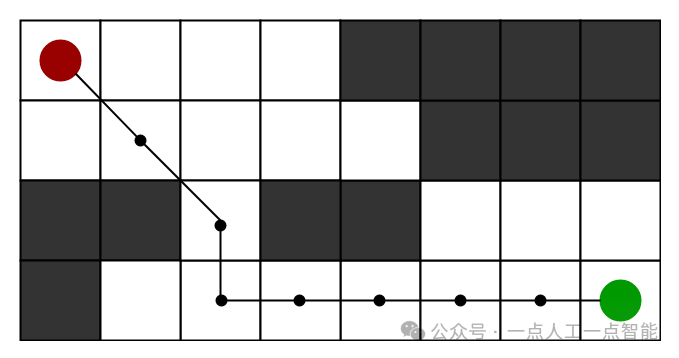
¶Ї»ъЈєОЄБЛФЪПЦКµЙъ»оЦРЅьЛЖЗуЅвЧо¶МВ·ѕ¶Ј¬АэИзµШНјЎўУОП·µИґжФЪРн¶аХП°ОпµДЗйїцЎЈОТГЗїЙТФїјВЗТ»ёцє¬УР¶аёцХП°ОпµД¶юО¬НшёсНјЈ¬ОТГЗґУЖрКјµҐФЄёсЈЁПВ·ЅємЙ«±кјЗЈ©їЄКјЈ¬іЇЧЕДї±кµҐФЄёсЈЁПВ·ЅВМЙ«±кјЗЈ©З°ЅшЎЈ

КІГґКЗA*ЛСЛчЛг·Ё
A*ЛСЛчЛг·ЁКЗТ»ЦЦУГУЪВ·ѕ¶ЛСЛчєННј±йАъµДР§№ыєЬєГЎўЦчБчµДјјКхЦ®Т»ЎЈ
1.1 ОЄКІГґСЎФсA*ЛСЛчЛг·ЁЈї
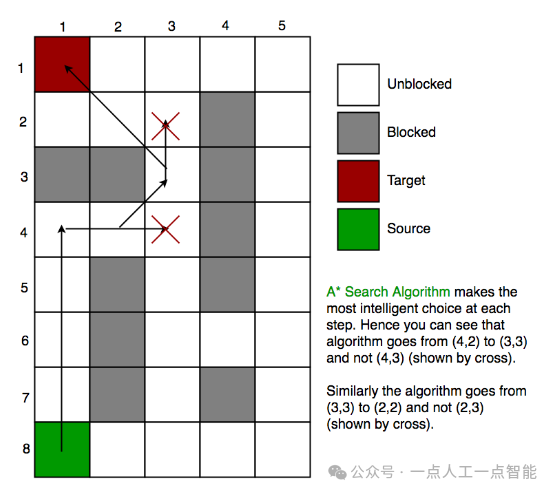
јтµҐµШЛµЈ¬A*ЛСЛчЛг·ЁУлЖдЛы±йАъјјКхІ»Н¬Ј¬ЛьѕЯУРЎ°ЦЗДЬЎ±ЎЈХвТвО¶ЧЕЛьКЗТ»ЦЦ·ЗіЈЦЗДЬµДЛг·ЁЈ¬УлЖдЛыґ«НіЛг·ЁУРЛщЗш±рЎЈПВГжµДІї·ЦЅ«ПкПёЅвКНХвТ»µгЎЈ
ЦµµГТ»МбµДКЗЈ¬Рн¶аУОП·єН»щУЪWebµДµШНјК№УГХвёцЛг·ЁАґёЯР§µШХТµЅЧо¶МВ·ѕ¶ЈЁЅьЛЖЈ©ЎЈ
1.2 ЅвКН
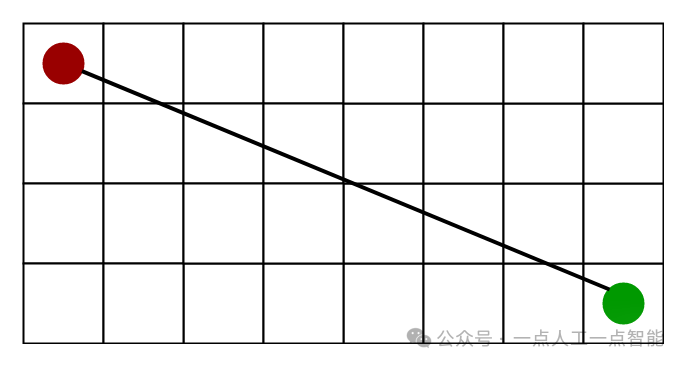
їјВЗТ»ёцУРРн¶аХП°ОпµДХэ·ЅРОНшёсЈ¬ёш¶ЁТ»ёцЖрКјµҐФЄёсєНТ»ёцДї±кµҐФЄёсЎЈОТГЗПЈНыѕЎїмґУЖрКјµҐФЄёсµЅґпДї±кµҐФЄёсЈЁИз№ыїЙДЬЈ©ЎЈХвК±A*ЛСЛчЛг·ЁѕНЕЙЙПУГіЎБЛЎЈ
A*ЛСЛчЛг·ЁФЪГїТ»ІЅЦРСЎФсТ»ёцЅЪµгЈ¬ёщѕЭТ»ёцЦµfАґИ·¶ЁЈ¬ёГЦµКЗБЅёцЖдЛыІОКэgєНhµДєЇКэЎЈФЪГїТ»ІЅЦРЈ¬ЛьСЎФсѕЯУРЧоµНfЦµµДЅЪµг/µҐФЄёсЈ¬Іўґ¦АнёГЅЪµг/µҐФЄёсЎЈ
ОТГЗЅ«gєНh¶ЁТеИзПВЈє
gЈєґУЖрµгµЅНшёсЙПµДДіёцёш¶Ё·ЅёсµДТЖ¶ЇіЙ±ѕЈ¬СШЧЕЙъіЙµДВ·ѕ¶ЅшРРТЖ¶ЇЎЈ
hЈєґУёш¶Ё·ЅёсµЅЧоЦХДїµДµШµД№АјЖТЖ¶ЇіЙ±ѕЎЈХвНЁіЈ±»іЖОЄЖф·ўКЅЈ¬ЛьЦ»КЗТ»ЦЦґПГчµДІВІвЎЈФЪХТµЅВ·ѕ¶Ц®З°Ј¬ОТГЗХжµДІ»ЦЄµАКµјКѕаАлЈ¬ТтОЄёчЦЦ¶«ОчїЙДЬЧи»б·Б°№ж»®µДВ·ѕ¶ЈЁЗЅ±ЪЎўЛ®µИЈ©ЎЈУРРн¶ајЖЛгХвёцhЦµµД·Ѕ·ЁЈ¬ХвР©·Ѕ·ЁФЪєуГжµДІї·ЦЦРЅшРРБЛМЦВЫЎЈ

Лг·Ё
ОТГЗґґЅЁБЅёцБР±н - їЄ·ЕБР±нЈЁOpen list)єН·в±ХБР±н(Closed list)ЈЁѕНПсDijkstraЛг·ЁТ»СщЈ©ЎЈ
// A* Search Algorithm1. Initialize the open list2. Initialize the closed list put the starting node on the open list (you can leave its f at zero)3. while the open list is not empty a) find the node with the least f on the open list, call it "q" b) pop q off the open listc) generate q's 8 successors and set their parents to q d) for each successor i) if successor is the goal, stop search ii) else, compute both g and h for successor successor.g = q.g + distance between successor and q successor.h = distance from goal to successor (This can be done using many ways, we will discuss three heuristics- Manhattan, Diagonal and EuclideanHeuristics) successor.f = successor.g + successor.h iii) if a node with the same position as successor is in the OPEN list which has a lower f than successor, skip this successor iV) if a node with the same position as successor is in the CLOSED list which has a lower f than successor, skip this successor otherwise, add the node to the open list end (for loop) e) push q on the closed list end (while loop)ЛщТФјЩЙиИзПВНјЛщКѕЈ¬Из№ыОТГЗПлТЄґУЖрКјµҐФЄёсµЅґпДї±кµҐФЄёсЈ¬A*ЛСЛчЛг·ЁЅ«°ґХХПВНјЛщКѕµДВ·ѕ¶ЅшРРЛСЛчЎЈЗлЧўТвЈ¬ПВНјКЗёщѕЭЕ·јёАпµВѕаАлЧчОЄЖф·ўКЅЛг·ЁЙъіЙµДЎЈ

Жф·ўКЅЛг·Ё
ОТГЗїЙТФјЖЛгgЈ¬µ«ИзєОјЖЛгhДШЈї
ОТГЗїЙТФІЙИЎТФПВ·Ѕ·ЁЈєA) ТЄГґјЖЛгhµДѕ«И·ЦµЈЁХвїП¶ЁКЗєДК±µДЈ©Ј¬»тХЯ B) К№УГДіР©Жф·ўКЅ·Ѕ·ЁАґЅьЛЖјЖЛгhЈЁК±јдПыєДЅПЙЩЈ©ЎЈ
ОТГЗЅ«МЦВЫХвБЅЦЦ·Ѕ·ЁЎЈ
3.1 ѕ«И·Жф·ўКЅ
ОТГЗїЙТФХТµЅhµДѕ«И·ЦµЈ¬µ«НЁіЈХвРиТЄєЬі¤К±јдЎЈ
ТФПВКЗТ»Р©јЖЛгhѕ«И·ЦµµД·Ѕ·ЁЎЈ
1) ФЪФЛРРA*ЛСЛчЛг·ЁЦ®З°Ј¬Ф¤ПИјЖЛгГї¶ФµҐФЄёсЦ®јдµДѕаАлЎЈ
2) Из№ыГ»УРЧиИыµҐФЄёсЈЁХП°ОпЈ©Ј¬ОТГЗїЙТФК№УГѕаА빫ʽ/Е·јёАпµВѕаАлЈ¬ФЪІ»ЅшРРИОєОФ¤ПИјЖЛгµДЗйїцПВХТµЅhµДѕ«И·ЦµЎЈ
3.2 ЅьЛЖЖф·ўКЅ
НЁіЈУРИэЦЦЅьЛЖЖф·ўКЅ·Ѕ·ЁАґјЖЛгhЈє
1) Вь№ю¶ЩѕаАлЈє
Ў¤ ЛьКЗДї±кµгµДxЧш±кєНyЧш±кУлµ±З°µҐФЄёсµДxЧш±кєНyЧш±кЦ®јдІоЦµµДѕш¶ФЦµЦ®єНЈ¬јґЈє
h = abs (current_cell.x ЁC goal.x) +
abs (current_cell.y ЁC goal.y)Ў¤ µ±Ц»ФКРнФЪЛДёц·ЅПтЙПТЖ¶ЇЈЁУТЎўЧуЎўЙПЎўПВЈ©К±Ј¬ОТГЗїЙТФК№УГХвёцЖф·ўКЅЛг·ЁЎЈВь№ю¶ЩѕаАлЖф·ўКЅЛг·ЁїЙТФНЁ№эПВНј±нКѕЈЁјЩЙиємµгОЄЖрКјµҐФЄёсЈ¬ВМµгОЄДї±кµҐФЄёсЈ©ЎЈ

2) ¶ФЅЗПЯѕаАлЈє
Ў¤ ЛьКЗДї±кµгµДxЧш±кєНyЧш±кУлµ±З°µҐФЄёсµДxЧш±кєНyЧш±кЦ®јдІоЦµµДѕш¶ФЦµµДЧоґуЦµЈ¬јґЈє
dx = abs(current_cell.x ЁC goal.x)
dy = abs(current_cell.y ЁC goal.y)
h = D * (dx + dy) + (D2 - 2 * D) * min(dx, dy)
where D is length of each node(usually = 1) and D2 is diagonal distance between each node (usually = sqrt(2) ).Ў¤ µ±Ц»ФКРнФЪ°Лёц·ЅПтЙПТЖ¶ЇК±ЈЁАаЛЖУЪ№ъјКПуЖеЦРµД№ъНхТЖ¶ЇЈ©Ј¬ОТГЗїЙТФК№УГХвёцЖф·ўКЅЛг·ЁЎЈ
¶ФЅЗПЯѕаАлЖф·ўКЅЛг·ЁїЙТФНЁ№эПВНј±нКѕЈЁјЩЙиємµгОЄЖрКјµҐФЄёсЈ¬ВМµгОЄДї±кµҐФЄёсЈ©ЎЈ

3) Е·јёАпµВѕаАлЈє
Ў¤ №ЛГыЛјТеЈ¬ЛьѕНКЗК№УГѕаА빫ʽјЖЛгµ±З°µҐФЄёсУлДї±кµҐФЄёсЦ®јдµДѕаАлЎЈ
h = sqrt ( (current_cell.x ЁC goal.x)2 +
(current_cell.y ЁC goal.y)2 )Ў¤ ХвёцЖф·ўКЅЛг·ЁКІГґК±єтК№УГДШЈї- µ±ОТГЗ±»ФКРнФЪИОТв·ЅПтЙПТЖ¶ЇК±ЎЈ
Е·јёАпµВѕаАлЖф·ўКЅЛг·ЁїЙТФНЁ№эПВНј±нКѕЈЁјЩЙиємµгОЄЖрКјµҐФЄёсЈ¬ВМµгОЄДї±кµҐФЄёсЈ©ЎЈ
УлЖдЛыЛг·ЁµД№ШПµЈЁПаЛЖРФєНІоТмЈ©ЈєDijkstraЛг·ЁКЗA*ЛСЛчЛг·ЁµДМШАэЈ¬ЖдЦРЛщУРЅЪµгµДhЦµ¶јОЄ0ЎЈ

КµПЦ
ОТГЗїЙТФК№УГИОєОКэѕЭЅб№№АґКµПЦїЄ·ЕБР±нєН·в±ХБР±нЈ¬µ«ОЄБЛ»сµГЧојСРФДЬЈ¬ОТГЗК№УГC++ STLЦРµДјЇєПКэѕЭЅб№№ЈЁКµПЦОЄємєЪКчЈ©єНТ»ёцІј¶ы№юПЈ±нУГУЪ·в±ХБР±нЎЈ
КµПЦУлDijkstraЛг·ЁАаЛЖЎЈИз№ыОТГЗК№УГміІЁДЗЖх¶САґКµПЦїЄ·ЕБР±нЈ¬¶шІ»КЗК№УГ¶юІж¶С/ЧФЖЅєвКчЈ¬ДЗГґРФДЬЅ«»бёьєГЈЁТтОЄміІЁДЗЖх¶СФЪЖЅѕщЗйїцПВРиТЄO(1)µДК±јдАґІеИлµЅїЄ·ЕБР±нІўјхРЎјьЦµЈ©ЎЈ
ґЛНвЈ¬ОЄБЛјхЙЩјЖЛгgЛщРиµДК±јдЈ¬ОТГЗЅ«К№УГ¶ЇМ¬№ж»®ЎЈ
// A C++ Program to implement A* Search Algorithm
#include <bits/stdc++.h>
using namespace std;
#define ROW 9
#define COL 10
// Creating a shortcut for int, int pair type
typedef pair<int, int> Pair;
// Creating a shortcut for pair<int, pair<int, int>> type
typedef pair<double, pair<int, int> > pPair;
// A structure to hold the necessary parameters
struct cell {
// Row and Column index of its parent
// Note that 0 <= i <= ROW-1 & 0 <= j <= COL-1
int parent_i, parent_j;
// f = g + h
double f, g, h;
};
// A Utility Function to check whether given cell (row, col)
// is a valid cell or not.
bool isValid(int row, int col)
{
// Returns true if row number and column number
// is in range
return (row >= 0) && (row < ROW) && (col >= 0)
&& (col < COL);
}
// A Utility Function to check whether the given cell is
// blocked or not
bool isUnBlocked(int grid[][COL], int row, int col)
{
// Returns true if the cell is not blocked else false
if (grid[row][col] == 1)
return (true);
else
return (false);
}
// A Utility Function to check whether destination cell has
// been reached or not
bool isDestination(int row, int col, Pair dest)
{
if (row == dest.first && col == dest.second)
return (true);
else
return (false);
}
// A Utility Function to calculate the 'h' heuristics.
double calculateHValue(int row, int col, Pair dest)
{
// Return using the distance formula
return ((double)sqrt(
(row - dest.first) * (row - dest.first)
+ (col - dest.second) * (col - dest.second)));
}
// A Utility Function to trace the path from the source
// to destination
void tracePath(cell cellDetails[][COL], Pair dest)
{
printf("\nThe Path is ");
int row = dest.first;
int col = dest.second;
stack<Pair> Path;
while (!(cellDetails[row][col].parent_i == row
&& cellDetails[row][col].parent_j == col)) {
Path.push(make_pair(row, col));
int temp_row = cellDetails[row][col].parent_i;
int temp_col = cellDetails[row][col].parent_j;
row = temp_row;
col = temp_col;
}
Path.push(make_pair(row, col));
while (!Path.empty()) {
pair<int, int> p = Path.top();
Path.pop();
printf("-> (%d,%d) ", p.first, p.second);
}
return;
}
// A Function to find the shortest path between
// a given source cell to a destination cell according
// to A* Search Algorithm
void aStarSearch(int grid[][COL], Pair src, Pair dest)
{
// If the source is out of range
if (isValid(src.first, src.second) == false) {
printf("Source is invalid\n");
return;
}
// If the destination is out of range
if (isValid(dest.first, dest.second) == false) {
printf("Destination is invalid\n");
return;
}
// Either the source or the destination is blocked
if (isUnBlocked(grid, src.first, src.second) == false
|| isUnBlocked(grid, dest.first, dest.second)
== false) {
printf("Source or the destination is blocked\n");
return;
}
// If the destination cell is the same as source cell
if (isDestination(src.first, src.second, dest)
== true) {
printf("We are already at the destination\n");
return;
}
// Create a closed list and initialise it to false which
// means that no cell has been included yet This closed
// list is implemented as a boolean 2D array
bool closedList[ROW][COL];
memset(closedList, false, sizeof(closedList));
// Declare a 2D array of structure to hold the details
// of that cell
cell cellDetails[ROW][COL];
int i, j;
for (i = 0; i < ROW; i++) {
for (j = 0; j < COL; j++) {
cellDetails[i][j].f = FLT_MAX;
cellDetails[i][j].g = FLT_MAX;
cellDetails[i][j].h = FLT_MAX;
cellDetails[i][j].parent_i = -1;
cellDetails[i][j].parent_j = -1;
}
}
// Initialising the parameters of the starting node
i = src.first, j = src.second;
cellDetails[i][j].f = 0.0;
cellDetails[i][j].g = 0.0;
cellDetails[i][j].h = 0.0;
cellDetails[i][j].parent_i = i;
cellDetails[i][j].parent_j = j;
/*
Create an open list having information as-
<f, <i, j>>
where f = g + h,
and i, j are the row and column index of that cell
Note that 0 <= i <= ROW-1 & 0 <= j <= COL-1
This open list is implemented as a set of pair of
pair.*/
set<pPair> openList;
// Put the starting cell on the open list and set its
// 'f' as 0
openList.insert(make_pair(0.0, make_pair(i, j)));
// We set this boolean value as false as initially
// the destination is not reached.
bool foundDest = false;
while (!openList.empty()) {
pPair p = *openList.begin();
// Remove this vertex from the open list
openList.erase(openList.begin());
// Add this vertex to the closed list
i = p.second.first;
j = p.second.second;
closedList[i][j] = true;
/*
Generating all the 8 successor of this cell
N.W N N.E
\ | /
\ | /
W----Cell----E
/ | \
/ | \
S.W S S.E
Cell-->Popped Cell (i, j)
N --> North (i-1, j)
S --> South (i+1, j)
E --> East (i, j+1)
W --> West (i, j-1)
N.E--> North-East (i-1, j+1)
N.W--> North-West (i-1, j-1)
S.E--> South-East (i+1, j+1)
S.W--> South-West (i+1, j-1)*/
// To store the 'g', 'h' and 'f' of the 8 successors
double gNew, hNew, fNew;
//----------- 1st Successor (North) ------------
// Only process this cell if this is a valid one
if (isValid(i - 1, j) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i - 1, j, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i - 1][j].parent_i = i;
cellDetails[i - 1][j].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i - 1][j] == false
&& isUnBlocked(grid, i - 1, j)
== true) {
gNew = cellDetails[i][j].g + 1.0;
hNew = calculateHValue(i - 1, j, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i - 1][j].f == FLT_MAX
|| cellDetails[i - 1][j].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i - 1, j)));
// Update the details of this cell
cellDetails[i - 1][j].f = fNew;
cellDetails[i - 1][j].g = gNew;
cellDetails[i - 1][j].h = hNew;
cellDetails[i - 1][j].parent_i = i;
cellDetails[i - 1][j].parent_j = j;
}
}
}
//----------- 2nd Successor (South) ------------
// Only process this cell if this is a valid one
if (isValid(i + 1, j) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i + 1, j, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i + 1][j].parent_i = i;
cellDetails[i + 1][j].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i + 1][j] == false
&& isUnBlocked(grid, i + 1, j)
== true) {
gNew = cellDetails[i][j].g + 1.0;
hNew = calculateHValue(i + 1, j, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i + 1][j].f == FLT_MAX
|| cellDetails[i + 1][j].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i + 1, j)));
// Update the details of this cell
cellDetails[i + 1][j].f = fNew;
cellDetails[i + 1][j].g = gNew;
cellDetails[i + 1][j].h = hNew;
cellDetails[i + 1][j].parent_i = i;
cellDetails[i + 1][j].parent_j = j;
}
}
}
//----------- 3rd Successor (East) ------------
// Only process this cell if this is a valid one
if (isValid(i, j + 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i, j + 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i][j + 1].parent_i = i;
cellDetails[i][j + 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i][j + 1] == false
&& isUnBlocked(grid, i, j + 1)
== true) {
gNew = cellDetails[i][j].g + 1.0;
hNew = calculateHValue(i, j + 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i][j + 1].f == FLT_MAX
|| cellDetails[i][j + 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i, j + 1)));
// Update the details of this cell
cellDetails[i][j + 1].f = fNew;
cellDetails[i][j + 1].g = gNew;
cellDetails[i][j + 1].h = hNew;
cellDetails[i][j + 1].parent_i = i;
cellDetails[i][j + 1].parent_j = j;
}
}
}
//----------- 4th Successor (West) ------------
// Only process this cell if this is a valid one
if (isValid(i, j - 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i, j - 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i][j - 1].parent_i = i;
cellDetails[i][j - 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i][j - 1] == false
&& isUnBlocked(grid, i, j - 1)
== true) {
gNew = cellDetails[i][j].g + 1.0;
hNew = calculateHValue(i, j - 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i][j - 1].f == FLT_MAX
|| cellDetails[i][j - 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i, j - 1)));
// Update the details of this cell
cellDetails[i][j - 1].f = fNew;
cellDetails[i][j - 1].g = gNew;
cellDetails[i][j - 1].h = hNew;
cellDetails[i][j - 1].parent_i = i;
cellDetails[i][j - 1].parent_j = j;
}
}
}
//----------- 5th Successor (North-East)
//------------
// Only process this cell if this is a valid one
if (isValid(i - 1, j + 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i - 1, j + 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i - 1][j + 1].parent_i = i;
cellDetails[i - 1][j + 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i - 1][j + 1] == false
&& isUnBlocked(grid, i - 1, j + 1)
== true) {
gNew = cellDetails[i][j].g + 1.414;
hNew = calculateHValue(i - 1, j + 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i - 1][j + 1].f == FLT_MAX
|| cellDetails[i - 1][j + 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i - 1, j + 1)));
// Update the details of this cell
cellDetails[i - 1][j + 1].f = fNew;
cellDetails[i - 1][j + 1].g = gNew;
cellDetails[i - 1][j + 1].h = hNew;
cellDetails[i - 1][j + 1].parent_i = i;
cellDetails[i - 1][j + 1].parent_j = j;
}
}
}
//----------- 6th Successor (North-West)
//------------
// Only process this cell if this is a valid one
if (isValid(i - 1, j - 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i - 1, j - 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i - 1][j - 1].parent_i = i;
cellDetails[i - 1][j - 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i - 1][j - 1] == false
&& isUnBlocked(grid, i - 1, j - 1)
== true) {
gNew = cellDetails[i][j].g + 1.414;
hNew = calculateHValue(i - 1, j - 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i - 1][j - 1].f == FLT_MAX
|| cellDetails[i - 1][j - 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i - 1, j - 1)));
// Update the details of this cell
cellDetails[i - 1][j - 1].f = fNew;
cellDetails[i - 1][j - 1].g = gNew;
cellDetails[i - 1][j - 1].h = hNew;
cellDetails[i - 1][j - 1].parent_i = i;
cellDetails[i - 1][j - 1].parent_j = j;
}
}
}
//----------- 7th Successor (South-East)
//------------
// Only process this cell if this is a valid one
if (isValid(i + 1, j + 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i + 1, j + 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i + 1][j + 1].parent_i = i;
cellDetails[i + 1][j + 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i + 1][j + 1] == false
&& isUnBlocked(grid, i + 1, j + 1)
== true) {
gNew = cellDetails[i][j].g + 1.414;
hNew = calculateHValue(i + 1, j + 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i + 1][j + 1].f == FLT_MAX
|| cellDetails[i + 1][j + 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i + 1, j + 1)));
// Update the details of this cell
cellDetails[i + 1][j + 1].f = fNew;
cellDetails[i + 1][j + 1].g = gNew;
cellDetails[i + 1][j + 1].h = hNew;
cellDetails[i + 1][j + 1].parent_i = i;
cellDetails[i + 1][j + 1].parent_j = j;
}
}
}
//----------- 8th Successor (South-West)
//------------
// Only process this cell if this is a valid one
if (isValid(i + 1, j - 1) == true) {
// If the destination cell is the same as the
// current successor
if (isDestination(i + 1, j - 1, dest) == true) {
// Set the Parent of the destination cell
cellDetails[i + 1][j - 1].parent_i = i;
cellDetails[i + 1][j - 1].parent_j = j;
printf("The destination cell is found\n");
tracePath(cellDetails, dest);
foundDest = true;
return;
}
// If the successor is already on the closed
// list or if it is blocked, then ignore it.
// Else do the following
else if (closedList[i + 1][j - 1] == false
&& isUnBlocked(grid, i + 1, j - 1)
== true) {
gNew = cellDetails[i][j].g + 1.414;
hNew = calculateHValue(i + 1, j - 1, dest);
fNew = gNew + hNew;
// If it isnЎЇt on the open list, add it to
// the open list. Make the current square
// the parent of this square. Record the
// f, g, and h costs of the square cell
// OR
// If it is on the open list already, check
// to see if this path to that square is
// better, using 'f' cost as the measure.
if (cellDetails[i + 1][j - 1].f == FLT_MAX
|| cellDetails[i + 1][j - 1].f > fNew) {
openList.insert(make_pair(
fNew, make_pair(i + 1, j - 1)));
// Update the details of this cell
cellDetails[i + 1][j - 1].f = fNew;
cellDetails[i + 1][j - 1].g = gNew;
cellDetails[i + 1][j - 1].h = hNew;
cellDetails[i + 1][j - 1].parent_i = i;
cellDetails[i + 1][j - 1].parent_j = j;
}
}
}
}
// When the destination cell is not found and the open
// list is empty, then we conclude that we failed to
// reach the destination cell. This may happen when the
// there is no way to destination cell (due to
// blockages)
if (foundDest == false)
printf("Failed to find the Destination Cell\n");
return;
}
// Driver program to test above function
int main()
{
/* Description of the Grid-
1--> The cell is not blocked
0--> The cell is blocked */
int grid[ROW][COL]
= { { 1, 0, 1, 1, 1, 1, 0, 1, 1, 1 },
{ 1, 1, 1, 0, 1, 1, 1, 0, 1, 1 },
{ 1, 1, 1, 0, 1, 1, 0, 1, 0, 1 },
{ 0, 0, 1, 0, 1, 0, 0, 0, 0, 1 },
{ 1, 1, 1, 0, 1, 1, 1, 0, 1, 0 },
{ 1, 0, 1, 1, 1, 1, 0, 1, 0, 0 },
{ 1, 0, 0, 0, 0, 1, 0, 0, 0, 1 },
{ 1, 0, 1, 1, 1, 1, 0, 1, 1, 1 },
{ 1, 1, 1, 0, 0, 0, 1, 0, 0, 1 } };
// Source is the left-most bottom-most corner
Pair src = make_pair(8, 0);
// Destination is the left-most top-most corner
Pair dest = make_pair(0, 0);
aStarSearch(grid, src, dest);
return (0);
}ПЮЦЖЈєѕЎ№ЬA*ЛСЛчЛг·ЁКЗДїЗ°ЧоєГµДВ·ѕ¶ЛСЛчЛг·ЁЈ¬µ«ЛьІўІ»ЧЬКЗДЬ№»ІъЙъЧо¶МВ·ѕ¶Ј¬ТтОЄЛьФЪјЖЛгhЦµК±СПЦШТААµЖф·ўКЅ/ЅьЛЖ·Ѕ·ЁЎЈ

У¦УГ
ХвКЗA*ЛСЛчЛг·ЁЧоУРИ¤µДІї·ЦЎЈЛьГЗ±»УГФЪУОП·ЦРЈЎµ«КЗИзєОК№УГДШЈї
ДгНж№эЛю·АУОП·ВрЈї
Лю·АКЗТ»ЦЦІЯВФАаКУЖµУОП·Ј¬Дї±кКЗНЁ№эЧиµІµРИЛµД№Ґ»чАґ±ЈОАНжјТµДБмНБ»тІЖІъЈ¬НЁіЈКЗНЁ№эФЪµРИЛµД№Ґ»чВ·ѕ¶ЙП»тСШЧЕЖ乥»чВ·ѕ¶ЙП·ЕЦГ·АУщЅб№№АґКµПЦµДЎЈ
A*ЛСЛчЛг·ЁѕіЈУГУЪХТµЅґУТ»ёцµгµЅБнТ»ёцµгµДЧо¶МВ·ѕ¶ЎЈДгїЙТФОЄГїёцµРИЛК№УГЛьАґХТµЅНЁПтДї±кµДВ·ѕ¶ЎЈ
ЖдЦРТ»ёцАэЧУКЗ·ЗіЈБчРРµДУОП·Ў¶Д§КЮХщ°ФIIIЎ·ЎЈ
5.1 Из№ыЛСЛчїХјдІ»КЗТ»ёцНшёс¶шКЗТ»ёцНјЈ¬ёГФхГґ°мЈї
ПаН¬µД№жФтТІККУГУЪНјЎЈСЎФсНшёсЧчОЄАэЧУКЗОЄБЛјтµҐАнЅвЎЈТтґЛЈ¬ОТГЗїЙТФК№УГA*ЛСЛчЛг·ЁФЪНјЦРХТµЅФґЅЪµгєНДї±кЅЪµгЦ®јдµДЧо¶МВ·ѕ¶Ј¬ѕНПсОТГЗФЪ¶юО¬НшёсЦРЧцµДДЗСщЎЈ
5.2 К±јдёґФУ¶И
їјВЗµЅНјЈ¬ОТГЗїЙДЬРиТЄ±йАъЛщУРµД±ЯІЕДЬґУФґЅЪµгµЅґпДї±кЅЪµгЈЁАэИзЈ¬їјВЗТ»ёцНјЈ¬ФґЅЪµгєНДї±кЅЪµгЦ®јдНЁ№эТ»ПµБР±ЯБ¬ЅУЈ¬Из0ЈЁФґЈ©->1->2->3ЈЁДї±кЈ©Ј©ЎЈ
ТтґЛЈ¬Чо»µЗйїцПВµДК±јдёґФУ¶ИКЗO(E)Ј¬ЖдЦРEКЗНјЦРµД±ЯКэЎЈ
ёЁЦъїХјд ФЪЧо»µµДЗйїцПВЈ¬ОТГЗїЙДЬРиТЄЅ«ЛщУРµД±ЯґжґўФЪїЄ·ЕБР±нЦРЈ¬ТтґЛЧо»µЗйїцПВЛщРиµДёЁЦъїХјдКЗO(V)Ј¬ЖдЦРVКЗ¶ҐµгµДЧЬКэЎЈ

ЧЬЅб
ДЗГґєОК±К№УГ№г¶ИУЕПИЛСЛчЈЁBFSЈ©¶шІ»КЗA*Лг·ЁЈ¬єОК±К№УГDijkstraЛг·Ё¶шІ»КЗA*Лг·ЁАґС°ХТЧо¶МВ·ѕ¶ДШЈї
ОТГЗїЙТФЧЬЅбИзПВЈє
1Ј©Т»ёцЖрµгєНТ»ёцДїµДµШЈє
Ў¤ К№УГA*ЛСЛчЛг·ЁЈЁККУГУЪОЮИЁНјєНјУИЁНјЈ©ЎЈ
2Ј©Т»ёцЖрµгЈ¬¶аёцДїµДµШЈє
Ў¤ ¶ФУЪОЮИЁНјЈєК№УГ№г¶ИУЕПИЛСЛчЈЁBFSЈ©ЎЈ
Ў¤ ¶ФУЪ·ЗёєИЁЦµµДјУИЁНјЈєК№УГDijkstraЛг·ЁЎЈ
Ў¤ ¶ФУЪґшУРёєИЁЦµµДјУИЁНјЈєК№УГBellman FordЛг·ЁЎЈ
3Ј©ИОТвБЅёцЅЪµгЦ®јдµДЧо¶МВ·ѕ¶Јє
Ў¤ К№УГFloyd-WarshallЛг·ЁЎЈ
Ў¤ К№УГJohnsonЛг·ЁЎЈ
±ѕОД·ЦПнЧФ Т»µгИЛ№¤Т»µгЦЗДЬ ОўРЕ№«ЦЪєЕЈ¬З°НщІйїґ
ИзУРЗЦИЁЈ¬ЗлБЄПµ cloudcommunity@tencent.com ЙѕіэЎЈ
±ѕОДІОУл?МЪС¶ФЖЧФГЅМе·ЦПнјЖ»®? Ј¬»¶УИИ°®РґЧчµДДгТ»ЖрІОУлЈЎ