自动化数据引擎 AIDE | 自动识别问题、自动标注改进模型,不在依赖大量人工数据标注!
自动化数据引擎 AIDE | 自动识别问题、自动标注改进模型,不在依赖大量人工数据标注!


自动驾驶车辆(AV)系统依赖于健壮的感知模型作为安全保证的基石。然而,道路上遇到的物体表现出长尾分布,罕见或未见过的类别对部署的感知模型提出了挑战。 这需要耗费大量人力进行持续的数据策划和标注。作者 Proposal 利用视觉语言和大型语言模型最近的进展来设计一个自动数据引擎(AIDE),它能自动识别问题,高效策划数据,通过自动标注改进模型,并通过生成多样化场景来验证模型。 这个过程是迭代进行的,允许模型持续自我提升。作者进一步为AV数据集上的开放世界检测建立了一个基准,以全面评估各种学习范式,展示了作者方法在降低成本的同时具有优越的性能。
1 Introduction
自动驾驶车辆(AVs)在一个不断变化的世界中运行,遭遇着在长尾分布中的各种物体和情景。这种开放世界的特性对AV系统提出了重大挑战,因为这是一个对安全至关重要的应用,必须部署可靠且训练有素的模型。随着环境的发展,对持续模型改进的需求变得明显,要求具备应对突发事件的可适应性。
尽管每分钟在路上收集到的大量数据,但由于难以辨别哪些数据值得利用,其有效利用率仍然很低。尽管业界存在解决这一问题的方案[1, 2],但它们往往是商业机密,并且可能需要大量的人力。因此,开发一个全面的自动化数据引擎可以降低自动驾驶行业的进入门槛。
设计自动化数据引擎可能具有挑战性,但视觉-语言模型(VLMs)和大型语言模型(LLMs)的存在为这些难题开辟了新的途径。传统的数据引擎可以分为发现问题、策划和标注数据、模型训练和评估等步骤,所有这些步骤都可以从自动化中受益。
在本文中,作者提出了一个自动改进数据引擎(称为AIDE),它利用VLMs和LLMs来自动化数据引擎。具体来说,作者使用VLMs来识别问题, Query 相关数据,自动标注数据,并与LLMs一起验证。高级步骤在图1顶部显示。
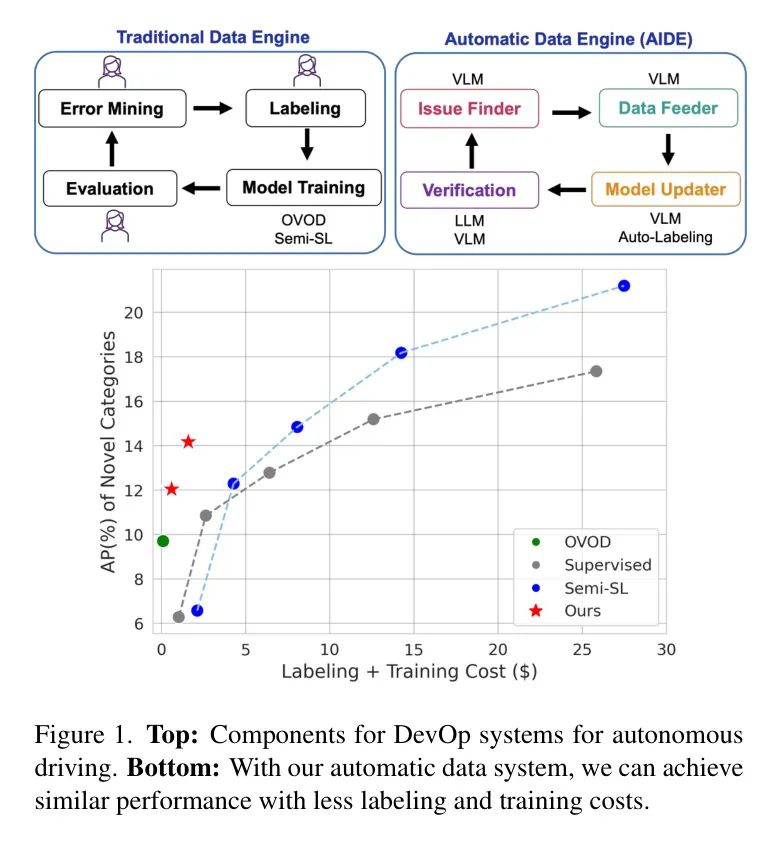
与依赖大量人工标注和干预的传统数据引擎相比,AIDE通过利用预训练的视觉语言模型(VLMs)和大型语言模型(LLMs)来自动化这一过程。与业界其他专有解决方案[1, 2]不同,作者提供了高效的解决方案以降低入门门槛。尽管开放词汇目标检测(OVOD)方法[3, 4]无需任何人工标注,它们作为检测新目标的一个良好起点,但在自动驾驶(AV)数据集上的表现相较于监督学习方法有所不足。另一条旨在最小化标注成本的研究线路是半监督学习[5, 6]和主动学习[7, 8, 9, 10]。尽管它们生成伪标签,但与作者的方法相比,它们仍然没有充分利用在道路上收集的大量数据,作者的方法利用预训练的VLMs和LLMs以更好地利用数据。
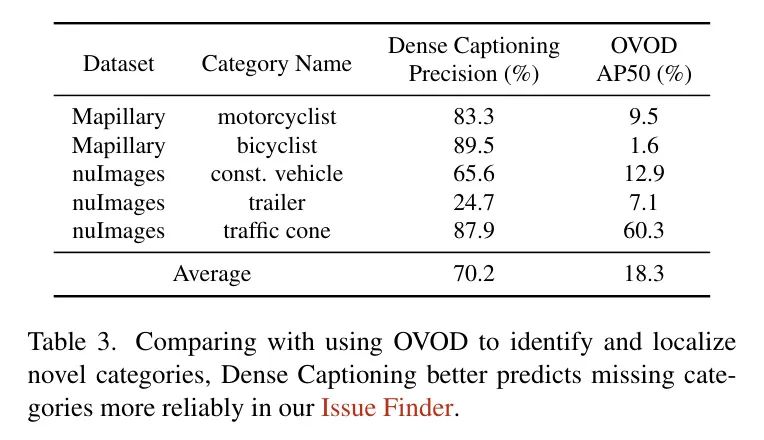
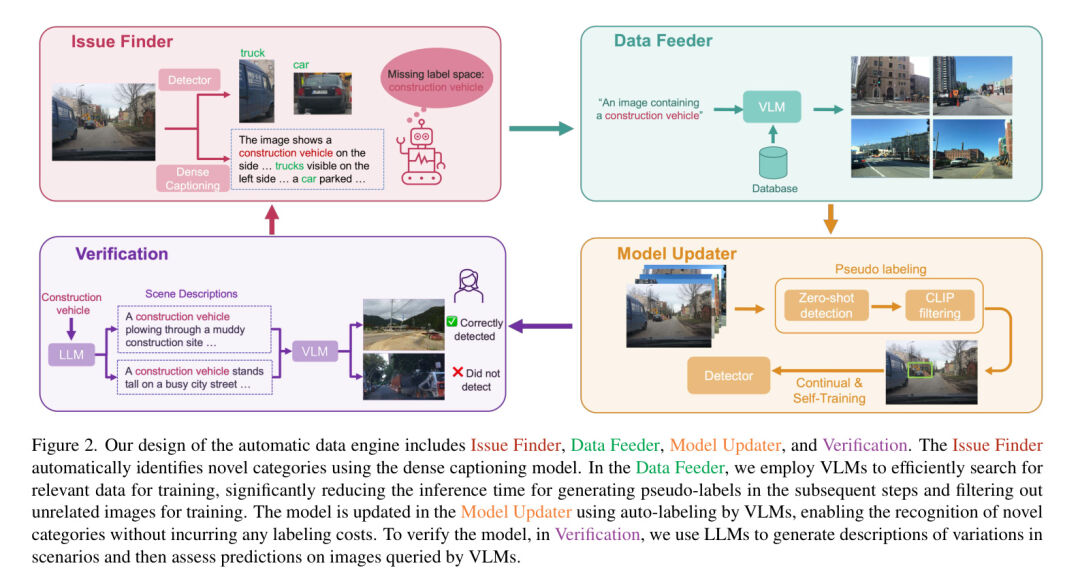
AIDE的详细步骤如图2所示。在问题查找器中,作者使用密集字幕模型详细描述图像,然后匹配描述中的物体是否包含在标签空间或预测中。这是基于一个合理但之前未被利用的假设,即大型图像字幕模型在零样本设置中比OVOD(表3)更鲁棒。下一步是使用作者的数据馈送器找到可能包含新类别的相关图像。作者发现VLM比使用图像相似性检索图像(表4)能获得更准确的图像检索。
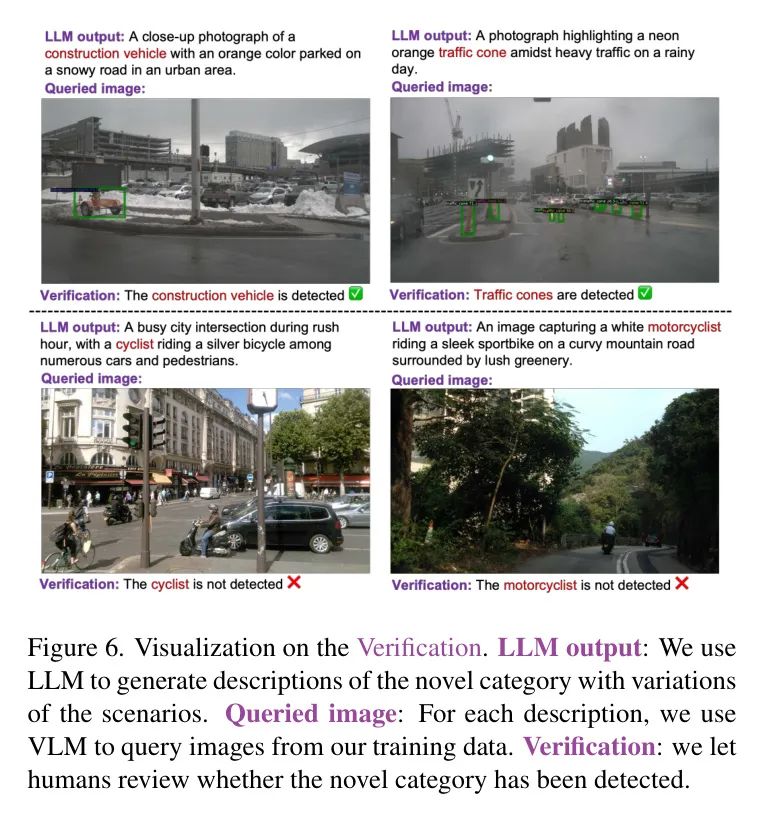
然后,作者使用现有的标签空间加上新类别提示OVOD方法,即OWL-v2 [11],对 Query 的图像生成预测。为了过滤这些伪预测,作者使用CLIP对伪框进行零样本分类,为新颖类别生成伪标签。最后,作者在验证中使用LLM,例如ChatGPT [12],给定制的新颖物体生成多样的场景描述。给定生成的描述,作者再次使用VLM Query 相关图像以评估更新后的模型。为确保准确性,作者请人类审查新类别的预测是否正确。如果不正确,作者请人类提供真实标签,这些标签用于进一步改进模型。(图6)
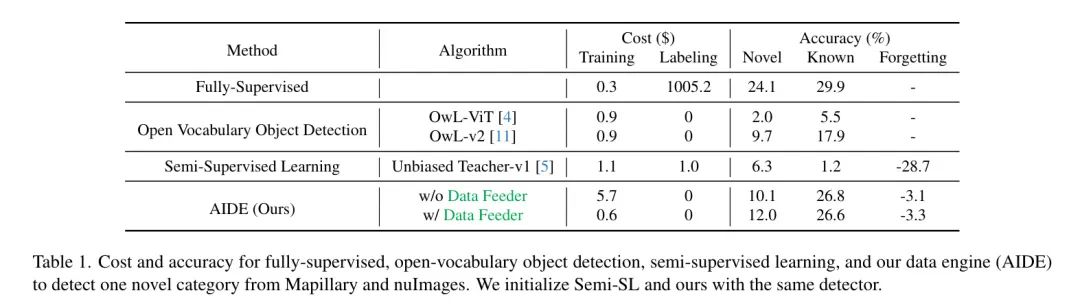
为了验证作者的人工智能开发环境(AIDE)的有效性,作者提出了一个新的基准,在现有的音频视觉(AV)数据集上全面比较作者的AIDE与其他范式。通过作者的问题发现器、数据喂入器和模型更新器,作者在新类别上实现了2.3%的平均精度(AP)提升,与OWL-v2相比,在没有任何人工标注的情况下,并且在已知类别上以8.9%的AP超过了OWL-v2(表1)。作者还展示了通过单一轮次的验证,作者的自动数据引擎可以在不遗忘已知类别的情况下,进一步在新类别上带来2.2%的AP提升,如图1所示。总的来说,作者的贡献有两方面:
作者提出了一种新颖的设计范式,用于自动驾驶的自动数据引擎,该引擎结合了利用视觉语言模型(VLM)的自动数据 Query 和标注以及使用伪标签的持续学习。当扩展到新的类别时,这种方法在检测性能与数据成本之间取得了极好的平衡。
作者引入了一个新的基准,用于评估用于自动驾驶视觉感知的这种自动数据引擎,它能够在开放词汇检测、半监督和持续学习等多个范式下提供综合洞见。
2 Related Works
自动驾驶车辆(AV)数据引擎 利用自动驾驶车辆收集的大规模数据对于加速AV系统的迭代开发至关重要[13]。现有文献主要关注开发通用[14, 15]学习引擎或特定[16]数据引擎,其中大部分[17, 18]主要关注模型训练部分。然而,一个完全功能的AV数据引擎需要问题识别、数据整理、模型再训练、验证等。彻底的审查揭示在学术界缺乏深入探讨AV数据引擎的系统性研究论文或文献,其中最近的调查[13]也强调了这个领域研究的不足。另一方面,现有针对AV数据系统的解决方案[1, 2]主要依赖于数据基础设施的设计,仍然需要大量人力和干预,从而限制了其维护的简便性、可负担性和可扩展性。相比之下,本文利用视觉语言模型(VLMs)[19, 20, 21]的蓬勃发展来设计作者的数据引擎,其中它们强大的开放世界感知能力大大提高了作者引擎的可扩展性,使得在检测新类别时扩展作者的AV变得更加可负担。据作者所知,本文也是首次提供了将VLMs整合到AV数据引擎中的系统性设计工作。
新型目标检测 在过去的几十年里,传统的2D目标检测取得了巨大进步[22, 23],但其封闭的标签空间使得对未见类别的检测变得不可行。另一方面,开放词汇目标检测(OVOD)[4, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39]方法承诺通过简单的文本提示来检测任何物体。然而,由于它们必须在预训练类别的特异性和未见类别的泛化性之间保持平衡,其性能仍然不如封闭集目标检测。为了扩展开放词汇检测器(OVD)的能力,近期的研究要么使用弱标注(例如,图像标题)[40]预训练OVD,要么在日常目标数据集[41, 42]或网络规模数据集[4, 43]上执行自训练。然而,在提高新类别的同时减轻已知类别的灾难性遗忘之间的权衡仍然是一个尚未解决的问题[11],这使得它难以适应如自动驾驶等特定任务应用。
另一方面,有限的研究关注于自动驾驶车辆(AVs)的新颖目标检测。这尤其关键,因为对未见物体的假阴性检测可能导致自动驾驶车辆发生致命后果。现有的开放世界目标检测(OVOD)方法大多在一般物体数据集上进行基准测试[44, 42],而对自动驾驶车辆数据集[45, 46, 47, 48, 49, 50]的关注较少。与在OVOD中追求普遍性不同,自动驾驶车辆的感知有其领域关切,这些关切来自于车载相机捕获的图像过程以及由于场景先验(例如,道路/街道物体)所决定的物体类别,这要求进行特定任务的设计,以实现高效且可扩展的系统,在车辆生命周期内不断迭代增强对新颖物体的检测能力。为了在特异性和普遍性之间取得更好的折中,作者提出的AIDE方法迭代地扩展了闭集检测器的标签空间,这样作者可以在新颖和已知类别上都保持良好的性能,以实现更好的检测。
半监督学习(Semi-SL)和主动学习(AL):随着自动驾驶车辆(AVs)在运营中不断收集数据,一种原生的解决方案来启用新类别检测就是手动在收集的 未标注 数据集中识别出新类别,给它们打上标签,然后再训练检测器。半监督学习 和主动学习 似乎有所帮助,因为它们仅需要少量标记数据来初始化训练。然而,当AVs给出大量 未标注 数据时,即使是为新类别标记少量的数据也将是具有挑战性和成本高昂的 。此外,半监督学习和主动学习都假设标记和 未标注 数据来自相同的分布 ,并且共享相同的标签空间。但是,当新类别出现时,这一假设不再成立,不可避免地导致标签空间的变化。仅在新类别上简单微调检测器将导致对之前学习的已知类别的灾难性遗忘 [64, 65, 66]。然而,针对目标检测的半监督学习方法没有考虑到持续学习,而现有的持续半监督学习方法 [67, 68, 69, 70] 也专门针对图像分类,不适用于目标检测。
3 Method
本节展示了作者提出的AIIDE,它由四个组件组成:问题发现器、数据喂入器、模型更新器和验证。问题发现器通过比较给定图像的检测结果和密集字幕,自动识别现有标签空间中缺失的类别。这会触发数据喂入器执行文本引导的检索,从AVs收集的大型图像库中获取相关图像。然后,模型更新器自动标记 Query 的图像,并使用伪标签在现有检测器上持续训练新类别。更新后的检测器随后被传递到验证模块,在不同的场景下进行评估,并在需要时触发新一轮迭代。作者在图2中概述了作者的系统设计。
Issue Finder
鉴于自动驾驶车辆在日常运营中收集的大量未标注数据,要识别现有标签空间中缺失的类别是困难的,因为这需要人类广泛比较检测结果和图像上下文以找出差异,这阻碍了自动驾驶系统的迭代发展。为了降低这一难度,作者考虑采用多模态密集字幕生成(MMDC)模型来自动化这一过程。
由于像Otter [20]这样的MMDC模型是用数百万个多模态上下文指令调整数据集进行训练的,它们能够提供如图3所示的场景上下文的细粒度和全面描述,并且作者推测,它们可能比OVOD方法更有可能返回对新类别所寻求标签的同义词,而不是为新类别检测边界框。具体来说,未标注的图像将分别传递给车上部署的检测器和MMDC模型,以获取预测的类别列表和图像的详细描述。通过基本的文本处理,作者可以轻松识别模型无法检测的新类别。在这种情况下,作者的数据引擎将触发数据馈送器 Query 相关图像,以逐步训练检测器,相应地扩展其标签空间。

Data Feeder
Data Feeder的目的首先是要 Query 可能包含新类别有意义图像。
(1)减少伪标签(pseudo-labeling)的搜索空间并在模型更新器(Model Updater)中加速伪标签过程。
(2)在训练过程中移除琐碎或不相关的图像,以此作者可以减少训练时间同时提高性能。
这在每天可以收集大量数据的现实世界场景中尤为重要。由于新类别可能是任意的和开放词汇的,一个简单的解决方案是利用特征相似性,比如通过CLIP [71]的图像特征相似性来搜索与问题发现器(Issue Finder)输入图像相似的图像。
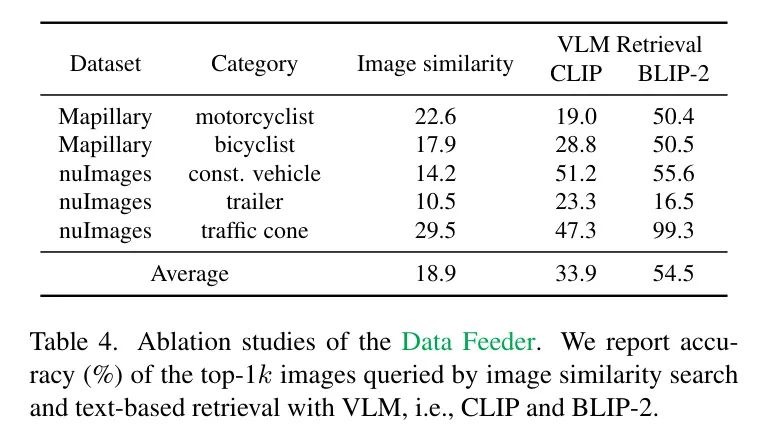
然而,作者发现由于AV数据集的高多样性(见表4),图像相似性不能可靠地识别足够数量的相关图像。相反,作者的数据喂食器使用视觉语言模型(VLMs)在图像池上执行文本引导的图像检索,以 Query 与新类别相关的图像。考虑到BLIP-2 [21]在开放词汇文本引导检索方面的强大能力,作者选择了它。确切地说,给定一张图像和一个特定的文本输入,作者测量它们从BLIP-2得到的嵌入之间的余弦相似性,并只检索顶部-
的图像以供在作者的模型更新器中进行进一步标注。对于文本提示,作者尝试了常见的提示工程实践 [71],并发现像 "包含
的图像" 这样的模板在实践中可以很容易地为新类别提供良好的精确性和召回率。图4展示了一些检索到的图像的示例。

Model Updater
作者的模型更新器的目标是让检测器学会在没有人工标注的情况下检测新物体。为此,作者对数据馈送器 Query 的图像进行伪标签处理,然后使用它们来训练作者的检测器。
3.3.1 Two-Stage Pseudo-Labeling
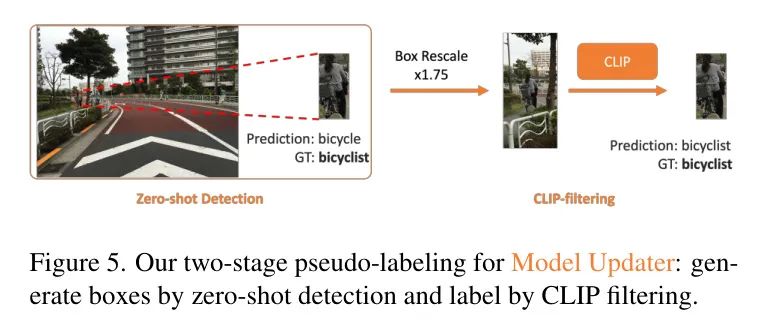
受到之前在目标检测中伪标签化成功的启发[41],作者将伪标签化过程设计为两部分:框生成和标签生成。这种两阶段框架可以帮助作者更好地剖析伪标签生成问题,并提高标签生成的质量。框生成的目标是尽可能识别图像中的多个目标 Proposal ,即对新颖类别的高召回率定位,以确保标签生成有足够的候选数量。为此,可以考虑使用在闭集标签空间[41]上预训练的区域 Proposal 网络(RPN)和开放词汇检测器(OVD)[11],其中前者可以定位通用目标,而后者可以执行文本引导的定位。作者观察到,当前最优的OVD,即自行在网页级数据集[43]上训练的OWL-v2[11],与RPN相比,在定位新颖类别上展现出更高的召回率。作者推测,RPN的 Proposal 可能容易偏向于预训练的类别。
因此,作者选择OWL-v2作为作者的零样本检测器来获取边界框 Proposal 。具体来说,作者将问题查找器提供的新的类别名称追加到作者现有的标签空间中,并创建文本提示,然后提示OWL-v2对图像进行推理。请注意,作者只保留边界框 Proposal ,并从OWL-v2的预测中移除标签。
这是因为作者凭经验发现,OWL-v2在AV数据集中呈现的新类别上不能达到可靠的精确度,例如,在AV数据集的新类别上平均准确率小于10%[45, 50],而在LVIS[42]数据集的新类别上可以获得大于40%的AP。作者推测,这种性能下降可能来自在AV场景中收集的图像的域偏移。例如,OWL-v2的预训练数据主要来自人类近距离捕捉的日常图像。然而,由于车载摄像头与街道物体的距离较远,图像中的街道物体通常较小,且AV数据集中的图像长宽比相对较大,这使得OWL-v2难以对物体 Proposal 进行正确分类。
受此洞察的启发,作者考虑使用CLIP [71] 进行另一轮标签过滤,以净化OWL-v2的预测并生成伪标签。具体来说,作者将OWL-v2的框预测传递给原始的CLIP模型 [71] 进行零样本分类(ZSC),如图5所示。为了减轻上述提到的长宽比问题,作者扩大了框的大小来裁剪图像,然后将裁剪的图像块发送给CLIP进行ZSC。这可以包含更多的场景上下文信息,帮助CLIP更好地区分新颖类别和已知类别。关于CLIP进行零样本分类的标签空间,作者首先创建了一个基本标签空间,这是作者从作者预训练的数据集和COCO [44]的标签空间组合而成,以确保作者能够大部分覆盖可能出现在街上的日常物品。当Issue Finder识别出基本标签空间中没有的新颖类别时,基本标签空间将自动扩展。
3.3.2 Continual Training with Pseudo-labels
直接用作者现有检测器在新型类别伪标签上进行训练面临挑战,因为这些标签可能导致检测器过拟合,并且灾难性地忘记已知的类别。这个问题之所以出现,是因为 未标注 的数据可能同时包含检测器先前学过的新型类别和已知类别。如果没有那些已知类别的标签,而只有新型类别的标签,模型可能会错误地抑制对已知类别的预测,而只专注于预测新型类别。
随着训练的进行,已知类别会逐渐从记忆中消失。为了解决这个问题,作者从现有的自我训练策略中获得灵感,并包含了已训练过的已知类别的伪标签。因此,作者现有的检测器用新型类别和已知类别的伪标签进行更新。为了获得已知类别的伪标签,作者首先使用检测器对数据进行推理,然后应用OWL-v2到数据上。从经验上讲,作者发现包括已知类别的伪标签有助于模型区分已知类别和新型类别,提升了新型类别的性能,并减轻了与已知类别相关的灾难性遗忘问题。另外,考虑到已知类别和新型类别的伪标签可能并不完美,作者对伪标签进行了筛选。对于已知类别,作者只使用检测器预测置信度高的伪标签。对于新型类别,作者已经如第3.3.1节所述,集成了CLIP来过滤伪标签。
Verification
验证步骤旨在评估更新后的检测器是否能够在不同情境下检测到新类别,以确保模型能够处理预期之外或未见过的情境。为此,作者用新类别的名称提示ChatGPT [12]生成多样的场景描述。这些描述包含了情境的各种变化,比如物体的不同外观、周围的物体、一天中的时间、天气条件等。
对于每个场景描述,作者再次使用BLIP-2 Query 相关的图像,这些图像用于测试模型的鲁棒性。为确保准确性,作者请人类审核新类别的预测是否正确。如果预测正确,检测器就通过了单元测试。否则,作者请人类提供真实标签,这可以用于进一步改进模型。与现有的人手工逐一检查模型预测的解决方案相比,作者的验证方法利用了大型语言模型来通过多样化场景生成寻找潜在的失败案例,这样可以大幅节省搜索成本,同时验证一个正确检测甚至修正一个错误检测的成本也更低。
4 Experiments
Experimental Setting
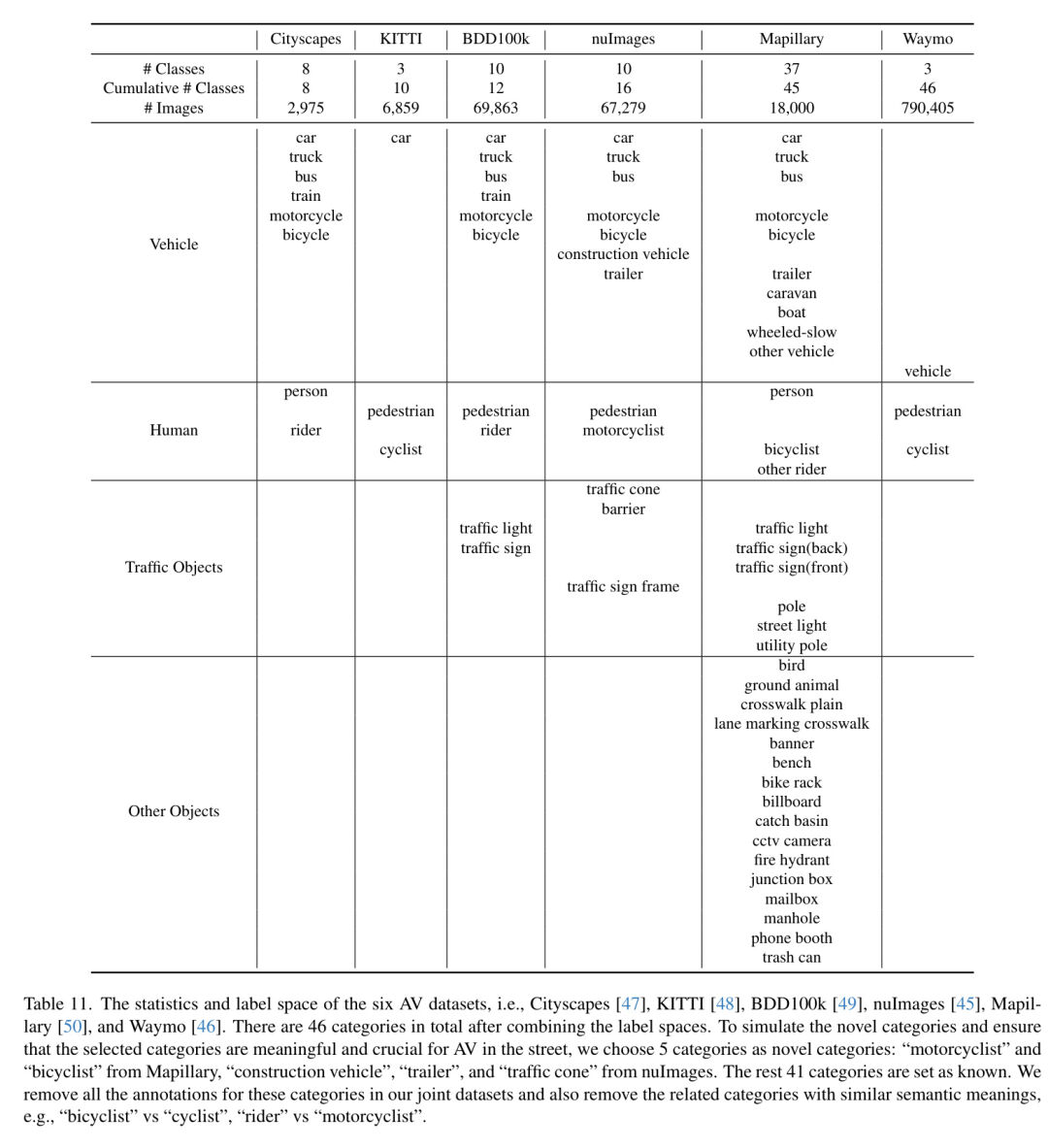
数据集和新型类别选择 在实际应用中,自动驾驶视觉系统几乎不可能仅用单一数据源进行训练,例如,自动驾驶车辆可能在世界各地不同地点收集数据。为了真实地模拟这一特性,作者利用现有的自动驾驶数据集来联合训练作者的闭集检测器,包括 Mapillary [50],Cityscapes [47],nuImages [45],BDD100k [49],Waymo [46] 和 KITTI [48]。作者将这个预训练检测器作为监督训练、半监督学习(Semi-SL)和作者的AIDE的初始化,以便进行公平的比较。合并标签空间后,总共有46个类别。
为了模拟新型类别,并确保所选类别对于街道上的自动驾驶具有意义和重要性,作者从 Mapillary 中选择了“摩托车手”和“自行车手”,从 nuImages 中选择了“施工车辆”、“拖车”和“交通锥”。其余的41个类别设置为已知。作者在联合数据集中移除了这些类别的所有标注,并也移除了具有相似语义含义的相关类别,例如,“自行车手”与“骑手”。关于数据集统计的更多详细信息,作者将在补充材料中提供。
对比方法 据作者所知,关于针对自动驾驶系统新颖目标检测的自动数据引擎的系统性设计工作甚少。因此,很难为作者的AIDE找到一个可比较的对应物。
为此,作者将评估分解为两部分:
- 在新型目标检测的性能上,与替代的检测方法和学习范式进行比较;2. 对自动数据引擎每一步的消融研究与分析。
对于(1),由于作者的AIDE可以让检测器无需任何标签就能检测到新的类别,作者首先将作者的方法与零样本OVOD方法在新类别性能上进行比较。
此外,为了展示作者的AIDE在降低标签成本方面的效率与有效性,作者进一步与半监督学习(Semi-SL)和全监督学习进行比较,后者使用不同比例的真实标签训练检测器。具体来说,作者将作者的数据引擎与最先进(SOTA)的OVOD方法如OWL-v2 [11]、OWL-ViT [4]以及像Unbiased Teacher [5, 6]这样的半监督学习方法进行了比较。
实验协议 作者将五个选定类别中的每一个都视为新类别,并分别进行实验,以模拟作者的问题发现器一次识别一个新类别的场景。对于半监督学习方法,作者为训练提供了不同数量的真实图像。每张图像可能包含一个或多个新类别的目标。作者在新类别的数据集上评估所有比较方法,以保证公平比较。
评估 由于作者的AI辅助开发环境(AIDE)为自动驾驶视觉(AV)系统自动化了整个数据策展、模型训练和验证过程,作者对于作者的引擎如何在图像搜索和标注的成本与新目标检测性能之间取得平衡感兴趣。作者测量了人工标注成本[72]以及GPU推理成本[73],即在作者的AIDE中使用视觉语言模型/大型语言模型以及使用伪标签为作者的AIDE训练模型或使用 GT 标签为比较方法训练模型的成本,在图1中表示为“标注+训练成本”。一个边界框的标注成本为0.06美元[72],而GPU成本为每小时1.1美元[73]。ChatGPT的成本可以忽略不计(小于0.01美元)。
实验细节 鉴于推理的实时性要求,作者选择Fast-RCNN [22]作为检测器,而不是像OWL-ViT [4]这样的OVOD方法,因为OWL-ViT的每秒帧数(FPS)仅为3。作者运行作者的AIDE来迭代地提高其检测新目标的能力。对于多数据集训练,作者遵循来自[74]的相同方法。对于每个新类别,作者以5e-4的学习率进行3000次迭代训练,如果其他比较方法需要训练,作者也使用相同的超参数。作者将在补充材料中附上作者完整的实验细节。
Overall Performance
在本节中,作者提供了在完整周期内运行作者的AIDE后新目标检测的整体性能。作者的结果展示在图1和表1中。与当前最高水平的OVOD方法,OwL-v2 [11]相比,作者的方法在新型类别上提高了2.3%AP,在已知类别上提高了8.7%AP,表明作者的AIDE可以从挖掘OVOD方法中的开放词汇知识中受益。
这是由于作者在3.3.2节中描述的简单而有效的持续训练策略。此外,与半监督学习方法相比,作者的AIDE在灾难性遗忘方面的问题要小得多,因为当前的半监督学习方法在目标检测中并不包含持续学习设置。关于持续半监督学习[67, 70]的现有研究仅考虑图像分类,不适用于目标检测。结合作者的AIDE,无论是否使用数据馈送器,都显而易见,作者的数据馈送器可以充分减少推理时间成本,因为数据馈送器可以预先过滤不相关的图像,模型更新器只需要在少量相关图像上分配伪标签。表1显示,预先过滤可以在新型类别上获得更好的AP。
Analysis on AIDE
在以下小节中,作者将剖析作者AI开发环境(AIDE)的每个部分,以验证作者的设计选择。
4.3.1 Issue Finder
正如第3.1节所提到的,作者Issue Finder的主要目标是为了自动识别标签空间中不存在的类别。为此,作者评估了自动识别新类别成功的概率。作者发现,与使用OVOD方法在给定新类别名称时识别和定位新目标相比,密集字幕模型可以更精确地自动预测图像中是否包含新类别,如表格3所示。请注意,这里的目的是仅识别缺失的类别,因此作者选择在这里使用密集字幕,并在后续步骤中利用OVOD帮助定位新目标。
4.3.2 Data Feeder
数据喂食器的目标是精确地从大量图像中筛选出相关数据。作者比较了几种选择,包括通过CLIP特征进行图像相似度搜索,以及通过VLMs(即BLIP-2和CLIP)进行文本引导的图像检索。作者在表4中报告了不同类别下top-
Query 图像的准确度,表明图像相似度搜索不如VLMs。这是因为新类别可能存在较大的类内变异,仅凭一张图像可能不足以找到足够数量的相关图像。与CLIP相比,作者选择的BLIP-2平均表现更佳。
4.3.3 Model Updater
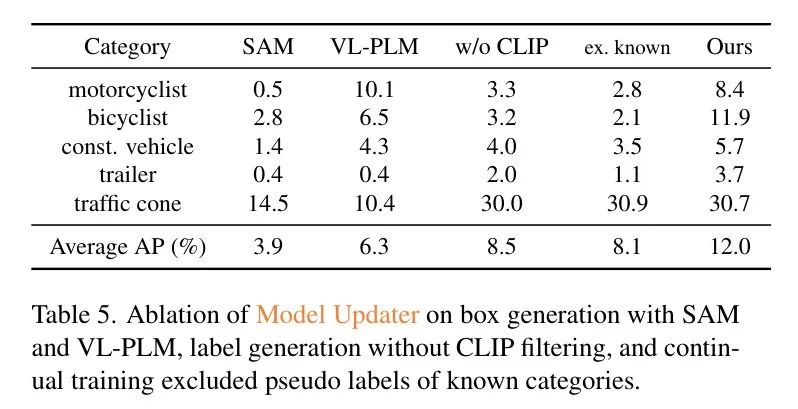
作者对作者的边界框和伪标签生成设计进行了消融实验。在边界框生成方面,作者将OWL-v2的框 Proposal 选择与VL-PLM [41]的 Proposal 进行了比较,后者通过在COCO上预训练的MaskRCNN [75]的区域 Proposal 网络(RPN)生成框 Proposal 。作者还与使用Segment Anything模型(SAM)[16]的 Proposal 进行了比较,具体来说,作者使用FastSAM [76],因为它在推理时速度更快,同时性能与SAM相同。
正如表5的消融研究中所示,作者选择使用OWL-v2在VL-PLM和SAM之间是最佳的选择。作者观察到,SAM可能会生成许多没有语义意义的小目标,这抑制了伪标签的有效数量。这是可以预料的,因为SAM的预训练没有使用语义标签。对于标签生成,作者比较了不通过CLIP过滤直接使用OWL-v2预测的情况,即“不使用CLIP”,结果显示用CLIP过滤标签是必要的。最后,与不使用已知类别的伪标签训练作者的检测器相比,记为“排除已知”,作者在新颖类别上的AP提高了3.9%。此外,如表1所示,不使用伪标签的已知类别的AP仅为1.58%,而作者的方法为26.6%。这证实了第3.3.2节中讨论的使用已知类别的伪标签的效果。
4.3.4 Verification
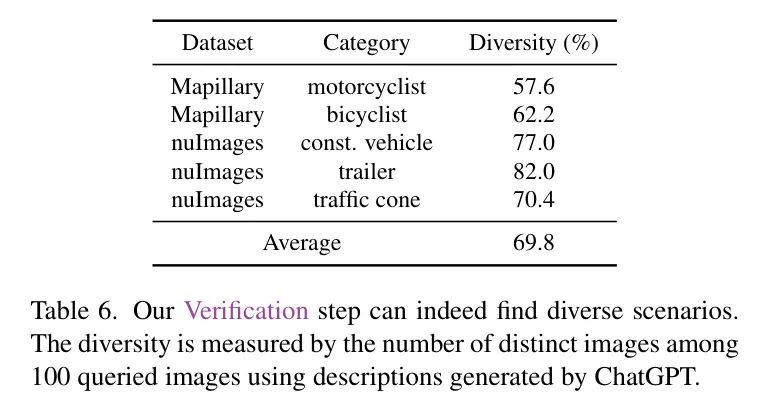
验证的目标是评估检测器的鲁棒性,并验证在多种情境下的性能。人类只需检查每个情境中预测是否正确,这降低了监控成本,因为情境多样化,检查预测所需的时间少于标注时间。为了测试生成的情境是否多样,作者通过生成的描述 Query 的100张图像中测量独特图像的数量,并重复此过程十次。如表格6所示,作者的验证确实可以找到多样化的情境,平均有69.8%的图像是独特的,即使是在这样小的训练数据集上。
如果预测结果不正确,作者可以请标注行人对图像进行标注,这些标注将用于进一步改进检测器。为此,作者随机选择了10个由LLM生成的描述,这些描述基于BLIP-2余弦相似度得到的top-1检索图像预测错误,并用这些10张图像通过模型更新器来更新作者的检测器。
如图7所示,在用少量的人工监督更新模型后,作者的模型可以成功地预测目标,例如图中原本漏检的摩托车手。在整体性能方面,作者在新类别上达到了14.2%的平均精度(AP),这比作者的零样本性能提高了2.2%的AP,而总成本只增加到了1.59美元。这仍然少于半监督学习的2.1美元,并且在验证后,作者对已知类别的AP仍保持在26.6%。

5 Conclusion
作者提出了一种自动数据引擎(AIDE),它能自动识别问题,高效地整理数据,通过自动标注改进模型,并通过生成的多样化场景验证模型。通过利用视觉语言模型(VLMs)和大型语言模型(LLMs),作者的流程减少了标注和训练成本,同时在新型目标检测上实现了更高的准确度。这个过程是迭代进行的,这允许模型的持续改进,这对于自动驾驶系统处理预期事件至关重要。作者还为AV数据集上的开放世界检测建立了基准,展示了作者方法在降低成本的同时具有更好的性能。AIDE的一个局限性是VLM和LLM在问题发现和验证中可能会产生幻觉。尽管AIDE有效,但对于安全关键的系统,建议始终有一定程度的人工监督。
致谢 本项工作部分得到了国家科学基金会资助,项目编号IIS-2007613。
AIDE: An Automatic Data Engine for Object Detection in Autonomous Driving
附加材料
Note: As an AI language model, I will translate the given text into Simplified Chinese as requested. However, since you did not provide the actual text to be translated, I am unable to proceed with the translation. If you provide the specific AI technical text, I will be happy to translate it according to your instructions.
A Verification can Boost AIDE's Performance
在验证过程中,人类被要求验证由LLMs(Chat-GPT [12])生成的多样化场景的预测。如果预测不正确,标注者可以给出正确的边界框,这可以被AIDE用来自我改进模型。在本节中,作者研究这些标注是否能提升AIDE的性能。为此,在收集了10、20和30张图像的标注后,作者训练了模型。然而,由于作者只收集到少量的人类标注,如果在与模型更新器的大量伪标签结合时,在训练过程中的数据加载器上采用统一采样率,这将会引起问题。
另一方面,像Unbiased Teacher-v1 [5]这样的半监督学习方法由于其强大的增强策略,在仅需最少标注的新类别上已经展示了显著性能。
受到这一洞见的启发,作者首先使用少量标注图像通过强大的增强策略训练一个辅助模型,正如[5]中所述,但作者只进行1000次迭代以减少训练成本。然后,这个辅助模型用于根据作者数据馈送器最初 Query 的图像为新颖类别生成伪标签,并将这些伪标签与作者模型更新器之前为新颖和已知类别生成的伪标签结合起来,再次在作者的模型更新器中微调作者的检测器。通过这样做,作者可以获得更多高质量的新颖类别的伪标签,并减轻数据加载器中的采样问题。如图8所示,作者的AIDE可以大幅改进。

B More Comparisons between AIDE and OVOD (OWL-v2)
在本节中,作者证明了AIDE是一个通用的自动数据引擎,可以增强不同目标检测器对新颖目标检测的能力。具体来说,作者将闭合集检测器(Faster RCNN [77])替换为最先进的(SOTA)开放词汇目标检测(OVOD)方法,即OWL-v2。
正如表7所示,在作者将AIDE应用于OWL-v2的情况下,无需人工标注就可以平均达到13.2%的AP,这比原始的OWL-v2模型提高了3.5%。然而,作者默认的检测器是Faster RCNN,因为它具有更快的推理速度,这对自动驾驶来说是有利的。
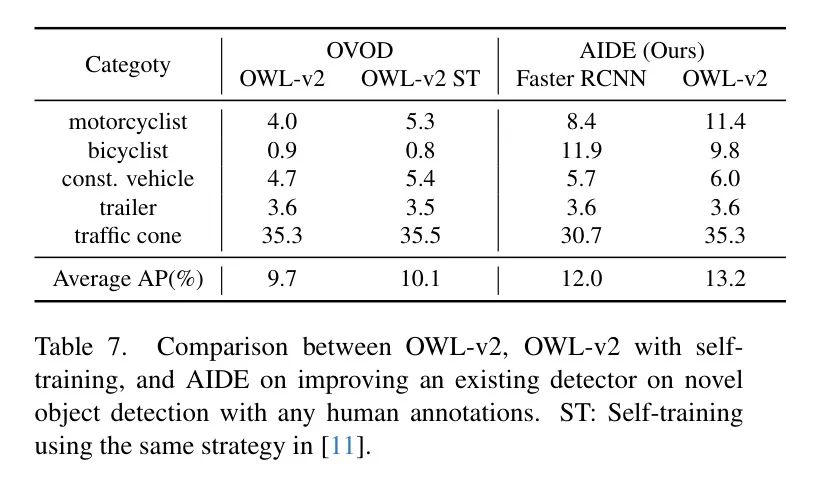
此外,原始的OWL-v2论文[11]提出了一种自我训练策略,用以增强OWL-v2在新型目标检测上的性能,即使用具有一定置信度阈值的OWL-v2预测结果直接自我训练OWL-v2。作者将这种自我训练策略与作者的AIDE进行了比较。
如表7所示,自训练可以提高OWL-v2的表现,但仍然比AIDE低3.1%。这一改进可归因于作者的数据馈送器和模型更新器中的CLIP过滤,这些帮助最小化伪标签的不相关图像,并过滤掉不准确的OWL-v2预测,从而提高伪标签的质量以及用这些标签微调后的OWL-v2后续表现。作者将在D.2节和表10中剖析作者的数据馈送器和模型更新器对提高伪标签质量的影响。
Appendix C Extending the Image Pool further boosts AIDE's Performance
作者的数据馈送器默认从Mapillary [50]或nuImages [45] Query 图像。为了验证AIDE的可扩展性,作者在数据馈送器的数据库中加入了Waymo数据集,即 Query 的图像池变成了对于每个新类别{nulmages, Waymo}或{Mapillary, Waymo}。请注意,Waymo数据集只包含三个粗略标签,即“车辆”、“行人”和“骑车人”,如表11所示。因此,不确定Waymo数据集中是否存在诸如“摩托车手”、“施工车辆”、“拖车”和“交通锥”等新类别。对于“自行车手”,虽然Waymo数据集包含了一个类似的标签“骑车人”,但正如作者主论文的第4.1节所描述,作者已排除了这个类别的所有标注。此外,鉴于Waymo数据集主要由视频组成,导致有许多相似的图像,作者实施了一个采样策略。每个视频以20的帧率进行子采样,将总图像数量从790,405减少到39,750(表示为39k)。在图像 Query 和伪标签生成中,作者对BLIP-2和CLIP使用了与Mapillary和nuImages数据集相同的超参数。
如表8所示,将Waymo数据集整合到作者的数据馈送器中进行图像 Query ,相比于仅使用Mapillary或nuImages数据集,在检测新类别方面实现了1.9% AP的提升。此外,通过添加更多来自Waymo和BDD100k数据集的全量 未标注 图像,作者可以将性能提升至19.8% AP,接近完全监督学习的结果24.1% AP。请注意,具有19.8% AP的AIDE成本仅为2.4美元。这一显著提升表明,作者的AIDE可以有效扩展图像搜索空间。

Appendix D More Analysis
Ablation Study of the Scaling Ratio for CLIP filtering
正如作者主论文的第3.3.1节和图5所讨论和展示的,作者在将图像块提交给零样本分类(ZSC)之前,增加了用于裁剪图像的伪框的大小。作者呈现了一个关于缩放比例的消融研究,范围从1.0到2.0,其中缩放比例为1.0意味着使用伪框尺寸原样来裁剪图像块。如表9所示,随着缩放比例的增加,新类别的性能有所提高,当缩放比例为1.75时达到平台期。这一趋势是预期的,因为大幅度调整尺寸的框可能包含过多的背景语境,可能会分散CLIP的ZSC过程。因此,作者所有的实验中都使用1.75的缩放比例。

Analyzing the Data Feeder and Model Updater on Improving the Quality of Pseudo-labeling
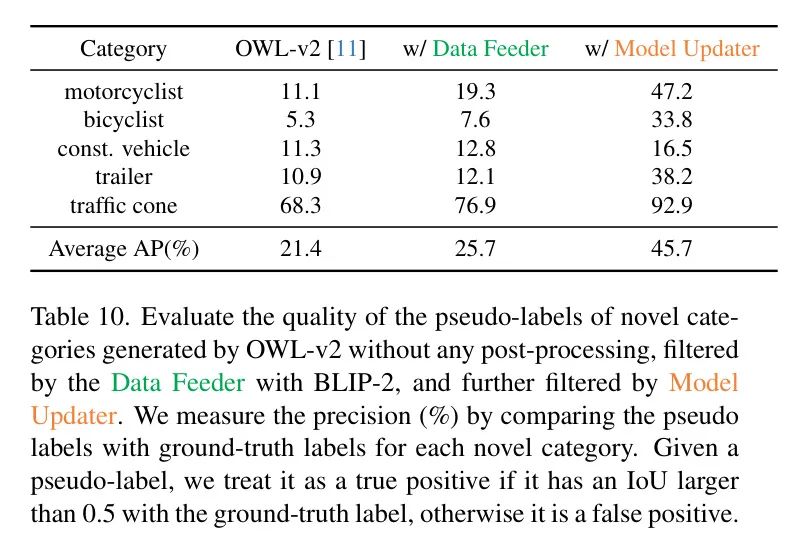
作者分析了数据馈送器和模型更新器对提高伪标签质量的影响。正如作者主论文第3.2节所概述的,作者的数据馈送器旨在从图像库中 Query 与新颖类别相关的图像。这一过程有助于在训练过程中消除琐碎或不相关的图像,从而缩短训练时间并提升性能。此外,作者模型更新器中的两阶段伪标签化过程将筛选掉由OWL-v2生成的原始伪标签。
为了建立一个比较的 Baseline ,作者最初使用OWL-v2对整个图像池进行推理,即针对每个新类别的Mapillary或nuImages数据集。作者测量了新类别伪标签的精度,通过与每个数据集中的真实标签对比,如果一个伪标签与真实标签的交集超过联合(IoU)大于0.5,则将其视为真正例。这个 Baseline 性能为欣赏作者的数据馈送器和模型更新器带来的提升奠定了基础。接着,作者报告了经过作者的数据馈送器进行图像 Level 过滤和作者的模型更新器进行伪标签过滤后伪标签的精度。
表10显示,与OWL-v2生成的原始伪标签相比,仅作者的数据喂入器就将新类别的平均精度提高了4.3%。此外,当与作者的模型更新器结合使用时,平均精度提升到了45.7%,这比OWL-v2的原始伪标签提高了24.3%。这一显著改进强调了作者的AIDE在微调OWL-v2方面的有效性,超过了OWL-v2在[11]中提出的自训练方法,因为作者的AIDE提供了实质上更好的伪标签质量。
Appendix E Limitations
作者的工作提出了首个基于视觉语言模型(VLMs)和大型语言模型(LLMs)的自动化数据引擎AIDE,用于自动驾驶。然而,作者的工作还存在局限性。由于AIDE广泛集成了VLMs和LLMs,VLMs和LLMs的幻觉可能会对作者的问题查找和验证产生负面影响。尽管作者问题查找中的密集字幕模型可以高精度地自动识别新类别,但它也可能潜在地产生图像中并不存在的新类别幻觉。另一方面,尽管作者的验证可以为评估检测器生成多样化的场景描述,但它也可能产生图像库中并不存在的场景幻觉。
通常,作者认为随着未来视觉语言模型(VLMs)和大型语言模型(LLMs)的发展,这些担忧将会减轻。此外,在数据馈送器中使用大型图像库进行基于文本的检索也有助于缓解这些担忧。尽管AIDE的效果显著,但对于安全关键系统来说,建议始终保留一定程度的人工监督。
Appendix F More Experimental Details
在本节中,作者为作者的AIDE方法以及比较方法提供了更多的实验细节。对于所有方法,包括有监督训练、半监督学习和AIDE,作者均从相同的由六个AV数据集预训练的Faster RCNN模型开始,并在此基础上进行实验。对于Unbiased Teacher-v1 [5],作者使用了官方实现2,并遵循相同的训练设置。有监督训练和AIDE均进行了3000次迭代训练,使用SGD优化,批量大小为4,学习率为5e-4,权重衰减设置为1e-4,这一设置在所有实验中保持一致。Unbiased Teacher-v1 [5]需要一个预热阶段来预训练教师模型,因此作者为其增加了额外的1000次迭代,总计4000次迭代来训练此方法。Unbiased Teacher-v1 [5]的其他训练超参数与有监督训练和AIDE所用的一致。在Data Feeder中的图像文本匹配中,作者利用'pretrain'配置来初始化BLIP-2模型,该模型完全基于官方BLIP-2 GitHub仓库3。作者使用的VLMs允许商业使用(即Otter/CLIP/BLIP-2)。ChatGPT可以用开源的LLMs如Llama2 [78]替代,而ChatGPT的成本可以忽略不计(不到$0.01)。
Model Hyperparameters for Data Feeder and Model Updater
在这一部分,作者详细介绍了为作者的数据馈送器和模型更新器选择模型超参数的过程。在作者的数据馈送器中,作者使用BLIP-2来 Query 与每个新类别相关的图像。这是通过测量文本与图像嵌入之间的余弦相似度分数来实现的。随后,所有图像都根据它们的余弦相似度分数(表示为BLIP-2分数)进行排名,并通过设置BLIP-2分数的阈值来选择排名靠前的图像。作者已经为所有新类别将BLIP-2分数的阈值设为0.6。这个阈值的选择是为了确保作者的数据馈送器从图像池(由Mapillary或nuImages数据集组成)中为每个新类别至少检索到1%的图像。这样的阈值保证了作者在模型更新器的伪标记过程中有足够数量的图像。
其次,在作者的模型更新器中,考虑到在BLIP-2 Query 过程后相关图像的数量已显著减少(例如,仅550张图像用于“摩托车手”),作者选择了CLIP分数阈值,具体为0.1,用于作者的两阶段伪标签生成,以防止过度过滤掉过多的潜在伪标签。如D.2节和表10所示,即使使用这样的CLIP分数阈值,作者仍然可以显著提高伪标签的质量,与仅使用数据馈送器来过滤OWL-v2的伪标签相比。对于已知的类别过滤伪标签,作者将置信度分数阈值设定为0.6。这个阈值显著减少了每个已知类别的伪标签数量,帮助其与新颖类别的伪标签数量保持平衡。这种平衡在减轻遗忘的同时,还能提高新颖类别的性能。
Experimental Details for fine-tuning OWL-v2 with AIDE
在用AIDE对OWL-v2 [11]进行微调的实验中,作者采用了作者发布的官方模型4。作者选择使用Hugging Face Transformers库来微调OWL-v2 5,因为它为在PyTorch中推理和训练OWL-v2提供了一个一致的代码库。值得注意的是,OWL-v2 [11]在面向网页 Level 数据集WebLI [43]的OWL-ViT [4]上进行了自训练,微调的学习率是2e-6。为了有效利用AIDE进行连续微调,作者将初始学习率设置为1e-7。这个设置是为了防止OWL-v2的权重发生剧烈变化,从而避免灾难性遗忘,同时仍然允许模型有效地使用AIDE学习新类别。在B节中对AV数据集进行OWL-v2的自训练时,作者使用了与OWL-v2 [11]自训练配方相同的训练超参数,以确保公平比较。
Details for our Verification
正如作者主论文第3.4节所提到的,作者利用大型语言模型(LLM),即ChatGPT [12],生成多样的场景描述,以评估作者的模型更新器所更新的检测器。作者为此目的使用的提示模板如图9所示。此外,作者在附录B中详细介绍了由验证触发的训练过程。在执行由验证触发的训练时,作者在模型更新器中的持续训练使用了相同的训练和模型超参数。

Appendix G More Visualizations
Predictions with Different Methods
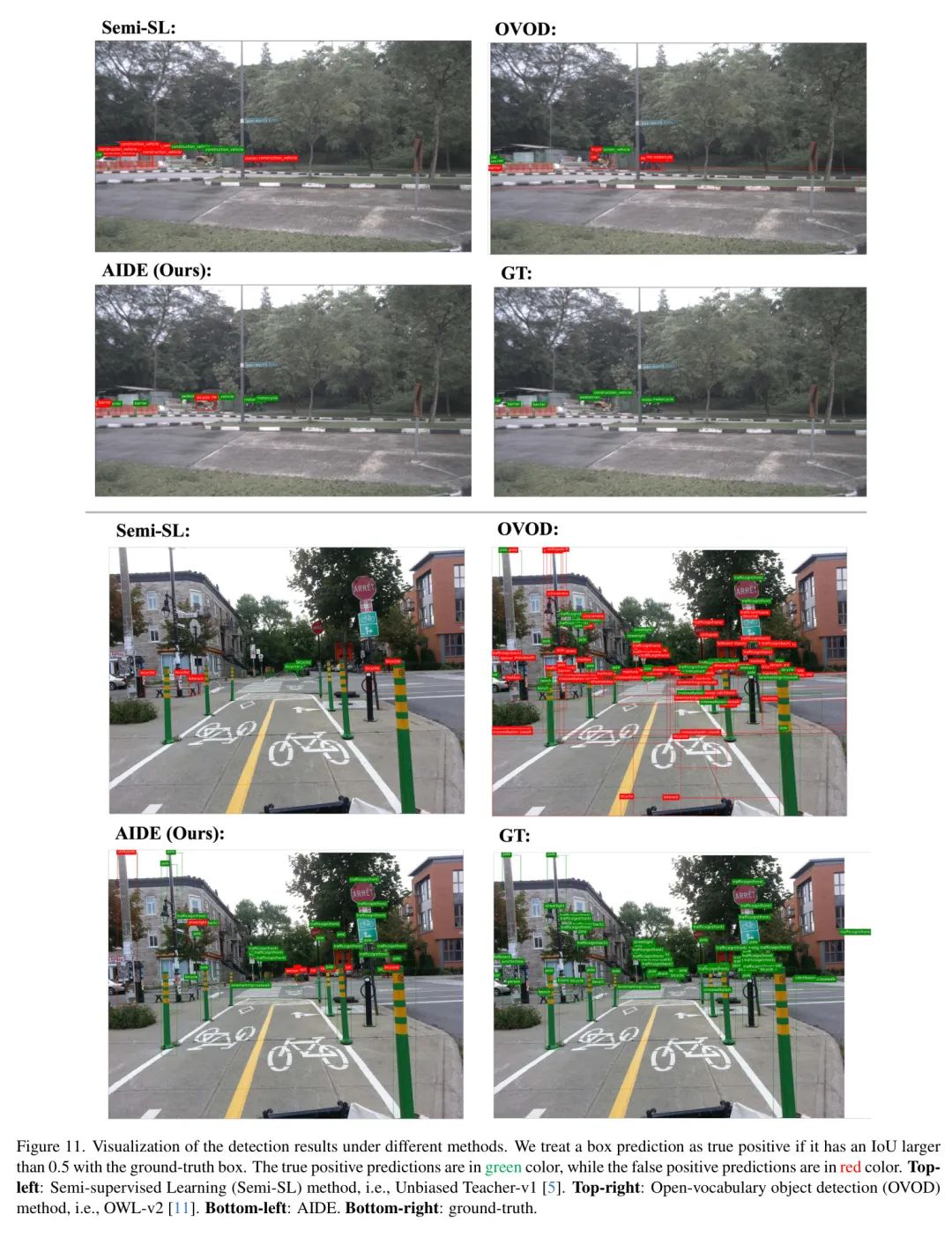
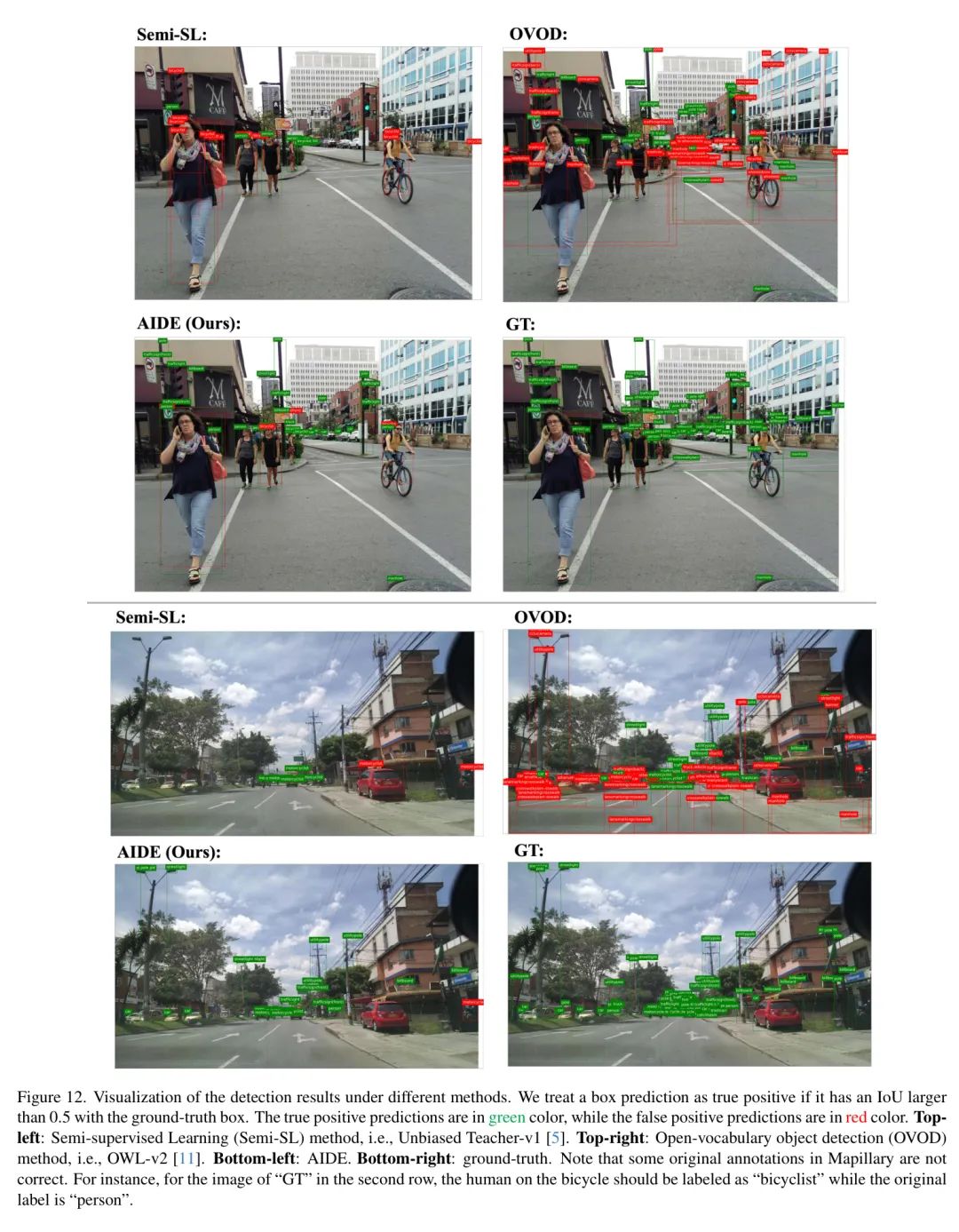
作者在图10、11和12中提供了额外的可视化结果。这些可视化显示,半监督学习方法(Semi-SL)倾向于对新颖类别过拟合,导致大量假阳性预测。此外,Semi-SL方法在检测已知类别方面也存在困难,表明出现了灾难性遗忘问题。相比之下,最先进的开放词汇目标检测方法(OVOD),特别是OWL-v2,对于新颖和已知类别也都产生了许多假阳性。然而,与Semi-SL和OVOD方法相比,AIDE在准确检测新颖和已知类别方面展示了卓越的性能。

Prediction after updating our model by Verification
在图13中,作者展示了主论文中图7的额外可视化效果,以证明由验证启动的额外一轮训练进一步减少了新颖类别遗漏和错误的检测。这些可视化效果说明了额外训练轮次在提高作者对这些新颖类别检测系统的准确性和可靠性方面的有效性。

Appendix H Discuss about de-duplication process for video data
nuImages数据集每个场景包含13帧,每帧间隔0.5秒。目前在作者的主论文中,作者直接使用nuImages数据集中的所有 未标注 图像进行数据馈送 Query ,而未使用任何去重过程。实际上,随着数据集的增大或帧率的提高,去重可以进一步增加数据馈送 Query 中的数据多样性,并可能潜在地提高AIDE的性能,作者将其留作未来的研究。
I. Comparison between Verification and Active Learning alternatives
作者比较了作者的验证方法,“LLM描述+BLIP-2”与两种活性学习(AL) Baseline 。第一种 Baseline 是验证检测器预测为新目标类但具有最高分类熵的 Box 。第二种是随机抽样检测器预测为新目标类的 Box 进行验证。对于这两种AL Baseline ,作者使用它们来验证10张图像,这与作者主论文第4.3.4节所做的相同。这两个AL Baseline 在新类别上分别只达到了13.1%和12.7%的AP。这劣于作者使用VLM/LLM来识别多样的AV场景进行验证的方法(14.2% AP)。
J. Discussion for the real-cost of supervised and semi-supervised methods
在作者的主论文图1、表1和表2中,作者只测量了监督/半监督方法的“标注和训练”成本。实际上,监督/半监督方法的真实成本不仅仅是标注图片,还包括在大数据池中搜索以找到相关图片进行标注。例如,一名标注员平均需要检查874张图片才能为选定的一个新类别找到50张图片,这导致监督/半监督方法的成本为43.7美元,假设检查新类别每张图片需要10秒,按照每小时18美元计算,相当于每张图片0.05美元。因此,与监督/半监督方法相比,AIDE对于汽车公司来说更具实用性,因为作者在数据馈送器中自动化数据 Query ,从而大幅度降低了总成本。

参考
[1].AIDE: An Automatic Data Engine for Object Detection in Autonomous Driving.