CVPR 2024 | DrivingGaussian:环视动态自动驾驶场景重建仿真
CVPR 2024 | DrivingGaussian:环视动态自动驾驶场景重建仿真


论文标题:DrivingGaussian: Composite Gaussian Splatting for Surrounding Dynamic Autonomous Driving Scenes 论文:https://arxiv.org/abs/2312.07920 项目主页:
https://github.com/VDIGPKU/DrivingGaussian
论文概述:
本文提出了DrivingGaussian,一个高效、高质量的动态环视驾驶场景三维重建与仿真框架。对于具有复杂背景和动态物体的室外驾驶场景,DrivingGaussian首先使用增量式3D高斯逐步建模整个场景的复杂静态背景。针对场景中运动的前景物体,DrivingGaussian构建了组合动态高斯图用以表征每个动态前景物体并恢复它们在场景中的准确位置和遮挡关系。DrivingGaussian还首次将LiDAR先验引入3D高斯表征,使用LiDAR点云先验作为初始化以更好地建模大规模环视动态场景的几何结构。DrivingGaussian在环视动态驾驶场景重建任务的表现优于现有方法,能够实现高保真度和多相机一致性的逼真场景重建和环视视图合成。同时在单目驾驶场景的重建任务上DrivingGaussian也表现出了优异的性能,并且能够支持自动驾驶场景的Corner Case仿真生成。
研究背景:
针对复杂动态场景的表征和建模是3D场景感知与理解的基础,并对一系列下游的自动驾驶任务至关重要。同时,对驾驶场景进行重建和可控仿真还能够合成驾驶过程中可能遇到的极端情况(例如corner case),有助于以较低成本验证和增强自动驾驶系统的安全性。另一方面,从稀疏的传感器数据中重建环视动态自动驾驶场景仍然是一个极具挑战性的问题,由于这类场景通常具有大规模的复杂背景和高速移动的动态前景物体,面临多样的光线变化和拓扑结构。因此,研究者们需要一种更加通用且高效的环视动态场景表征与建模方法。

方法介绍:
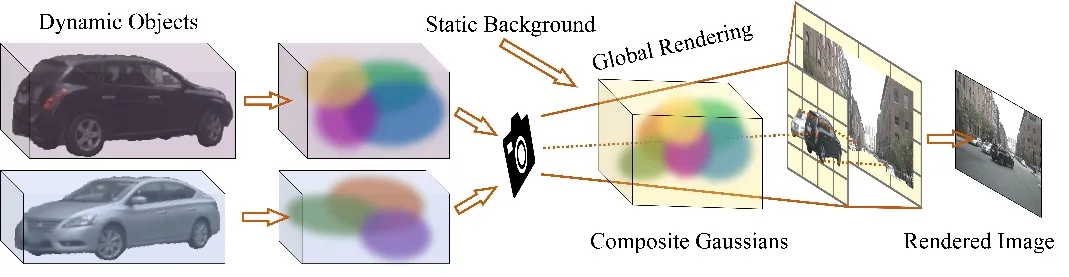
为了解决这些关键问题,本文提出了DrivingGaussian,一个用于环视动态自动驾驶场景的三维重建方法,以实现具有高保真和多相机一致性的逼真环视视图合成。DrivingGaussian的整体架构如下图所示:

对于具有大规模静态背景和多动态物体的复杂驾驶场景,DrivingGaussian首先通过增量式3D高斯逐步建模整个场景的静态背景。然后,我们基于组合动态高斯图建模多个运动对象并恢复它们在场景中的准确位置和遮挡关系。我们进一步利用LiDAR先验辅助建模场景表征的几何结构,结合全局渲染合成具有更高细节的场景视图并保证环视多相机的一致性。
a、增量式3D高斯背景重建
DrivingGaussian首先将动态驾驶场景中的静态背景和动态前景物体解耦,并通过增量式3D高斯建模驾驶场景的大规模静态背景。具体而言,增量式静态3D高斯利用自车运动引入的空间透视变化和相邻帧之间的时序关系将大规模场景划分为多个区域,渐进式地重建多个区域的静态背景并依次融合。增量式3D高斯背景重建能够很好地重建出复杂背景的细节信息,并能够以较低的计算代价重建整个大规模场景。
b、组合动态高斯图前景建模
由于自动驾驶场景往往具有大量的动态物体和复杂的遮挡关系,并且由于自车位移和动态对象的运动导致通常只能从有限的视角观测到实例物体。为了克服这些挑战,DrivingGaussian引入了组合动态高斯图,能够在大规模、长时序的自动驾驶场景中动态地表征建模运动实例。具体地,DrivingGaussian首先从静态背景中分离场景中每一个运动的实例物体。接着,我们构建动态高斯图,用多个独立的4D高斯表征动态物体,并用每个节点记录其在整个场景中的空间时序属性。最终,我们通过组合动态高斯图将全部动态实例物体组合进大规模静态背景,利用全局渲染得到高质量、高精度的合成渲染视图。
c、LiDAR点云先验
自动驾驶的无边界城市场景通常包含多尺度的背景和前景,具有复杂的拓扑结构和几何形状。为了更好地建模环视动态驾驶场景的几何结构,我们首次为3D高斯表征引入了LiDAR点云先验。考虑到动态前景可能会由于拖尾、混叠等现象导致LiDAR先验的误差。因此,我们首先从LiDAR点云中移除动态对象,获取静态LiDAR点云。然后,我们使用多帧聚合将场景的LiDAR点云作为先验来初始化当前可见区域的增量式3D高斯。LiDAR先验的空间坐标进一步通过校准矩阵转换为全局坐标系。相类似地,我们使用时序聚合的LiDAR点云先验进行动态物体的高斯初始化并在之后统一到全局坐标系中。
实验结果:
本方法主要在主流的环视动态自动驾驶数据集nuScenes上进行实验。DrivingGaussian在环视驾驶数据集nuScenes上与现有最先进的方法比较结果如下表所示:
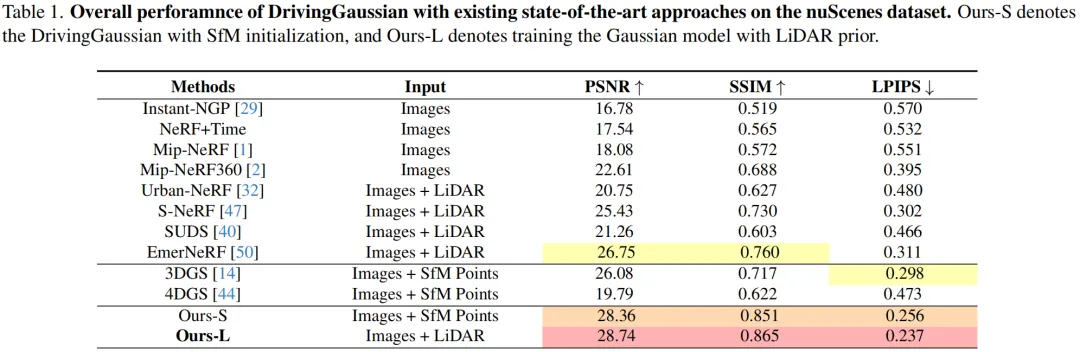
本文所提出的方法在多个评估指标中均表现出了优异的性能,超越现有方法。我们还测试了DrivingGaussian在单目自动驾驶数据集KITTI-360上的性能和现有方法的比较,结果如下表所示:

实验结果表明DrivingGaussian在单目驾驶场景的重建任务上仍然保持了出色的竞争力。
如下图定性实验结果所示,DrivingGaussian能够合成逼真的、具有完整几何结构和清晰纹理的渲染图像,精准地建模动态对象并恢复出正确的空间遮挡关系。此外DrivingGaussian还保证了环视多相机多视角的一致性。

下图展示了DrivingGaussian能够支持自动驾驶场景的Corner Case仿真模拟,合成现实场景中的突发事件和极端案例,从而生成更具价值的Corner Case数据集用于测试自动驾驶系统的安全性和可靠性。

结论:
本文提出了DrivingGaussian,一种基于3D高斯的动态环视驾驶场景三维重建与仿真框架,在大规模环视驾驶场景重建与仿真任务上表现出色,同时展现了在更多自动驾驶下游任务中的应用潜力。
再和大家说说我们之前做的《100个超强机器学习算法模型》。
一个人走的很快,但一群人会走的很稳,放假的小伙伴,趁着假期可以按照每一个算法模型,学习一番。